Underwater Gliders at NRC-IOT Ralf Bachmayer NRC-Institute for






9 Slides8.37 MB
Underwater Gliders at NRC-IOT Ralf Bachmayer NRC-Institute for Ocean Technology St. John’s, NL, Canada Monday, June 28, 2004
NRC-IOT
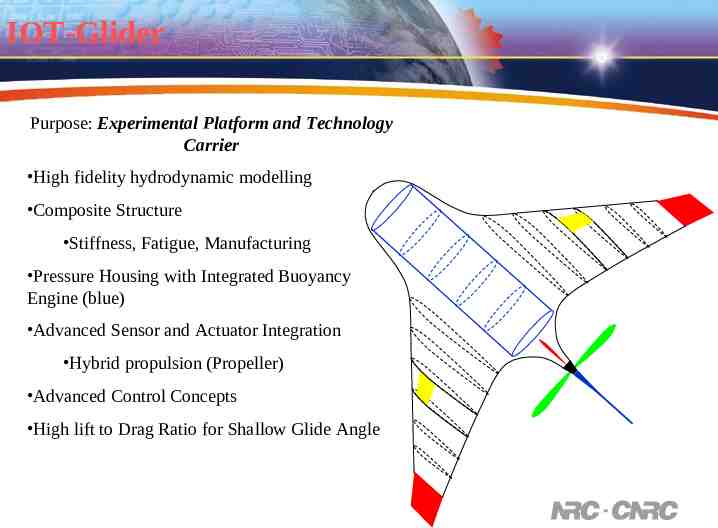
IOT-Glider Purpose: Experimental Platform and Technology Carrier High fidelity hydrodynamic modelling Composite Structure Stiffness, Fatigue, Manufacturing Pressure Housing with Integrated Buoyancy Engine (blue) Advanced Sensor and Actuator Integration Hybrid propulsion (Propeller) Advanced Control Concepts High lift to Drag Ratio for Shallow Glide Angle
Buoyancy Engine Design 6 5 Piston Driven Buoyancy Engine 1. Cylinder (PVC) with endcap 1 2. Diaphragm 3. Linear actuator 4. Single board computer (SBC) 5. Pressure Sensor (depth) 6. Tether for COMs and power Not shown: Internal pressure sensor 4 3 Alternative: Pump Bladder Design 2
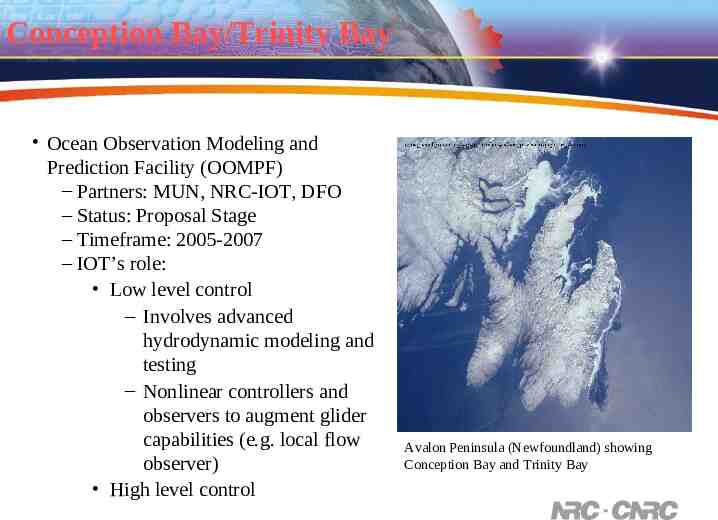
Conception Bay/Trinity Bay Ocean Observation Modeling and Prediction Facility (OOMPF) – Partners: MUN, NRC-IOT, DFO – Status: Proposal Stage – Timeframe: 2005-2007 – IOT’s role: Low level control – Involves advanced hydrodynamic modeling and testing – Nonlinear controllers and observers to augment glider capabilities (e.g. local flow observer) High level control Avalon Peninsula (Newfoundland) showing Conception Bay and Trinity Bay
Glider flight path Typical Glider Flight Plot for 05 February 2003 200km of glider tracks 3 gliders continuously deployed Automated Glider real-time position display for AOSN-II, June-august 2003.
High Level Control Meteorological model & database Buoys Asset Location UAV Last Projected Asset Status Last Next Gliders Gliders Health Monitor AUVs Simulations, errors Planning Module AUVs Ships Oceanographical model & database
Needs and Goals Gliders – Need for Data-visualization – 24/7 multi-vehicle operations require high degree of control center automation – Multi glider coordination/collaboration for path planning (e.g. in the presence of currents) NRC-IOT role – Laboratory scale glider Hydrodynamic modelling Low-level control Flowsensing – Ocean observation and modelling systems Integrated Asset Management Tool Multi-vehicle planning and coordination (homogeneous and heterogeneous groups)
Underwater Vehicle Technology 2004 Workshop in St. John’s, Newfoundland Date: 14-15 October Topic: Long endurance missions