Static and dynamic balancing of rigid rotors


29 Slides824.41 KB
Static and dynamic balancing of rigid rotors
When a rotor can be assumed rigid? The answerer depends on the rotor speed.
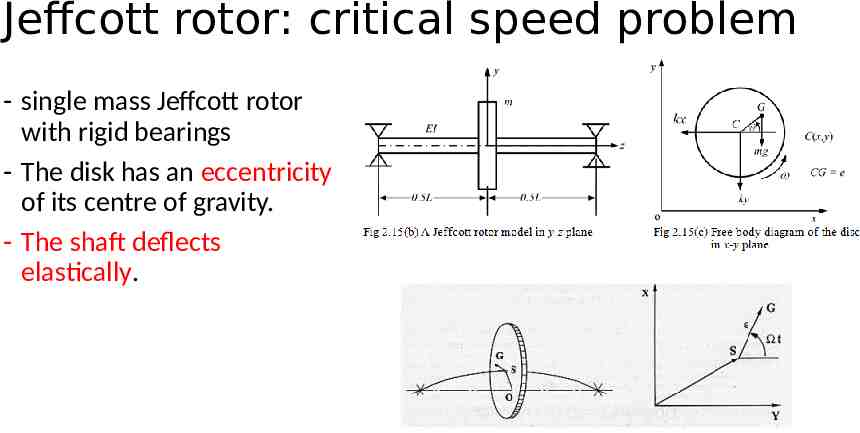
Jeffcott rotor: critical speed problem - single mass Jeffcott rotor with rigid bearings - The disk has an eccentricity of its centre of gravity. - The shaft deflects elastically.
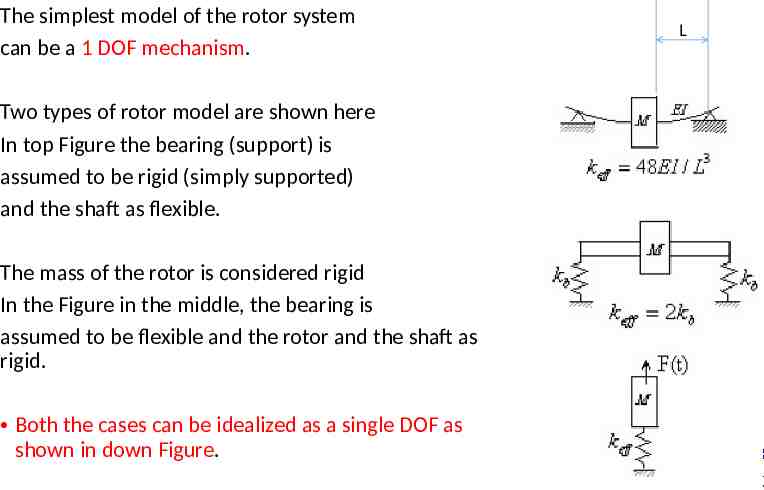
The simplest model of the rotor system can be a 1 DOF mechanism. Two types of rotor model are shown here In top Figure the bearing (support) is assumed to be rigid (simply supported) and the shaft as flexible. The mass of the rotor is considered rigid In the Figure in the middle, the bearing is assumed to be flexible and the rotor and the shaft as rigid. Both the cases can be idealized as a single DOF as shown in down Figure. L
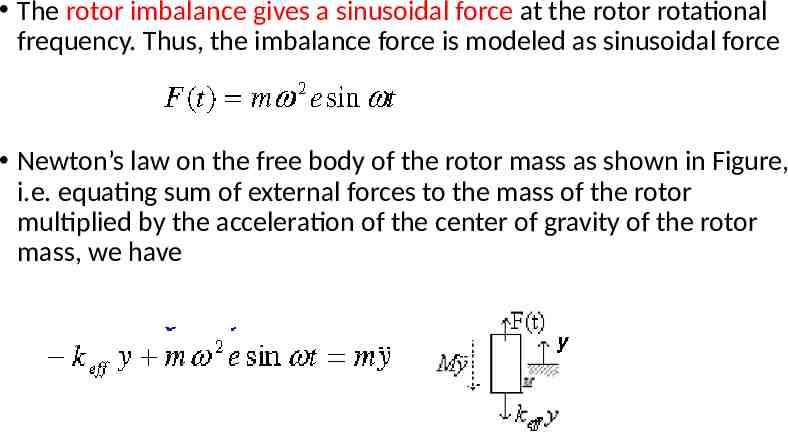
The rotor imbalance gives a sinusoidal force at the rotor rotational frequency. Thus, the imbalance force is modeled as sinusoidal force Newton’s law on the free body of the rotor mass as shown in Figure, i.e. equating sum of external forces to the mass of the rotor multiplied by the acceleration of the center of gravity of the rotor mass, we have
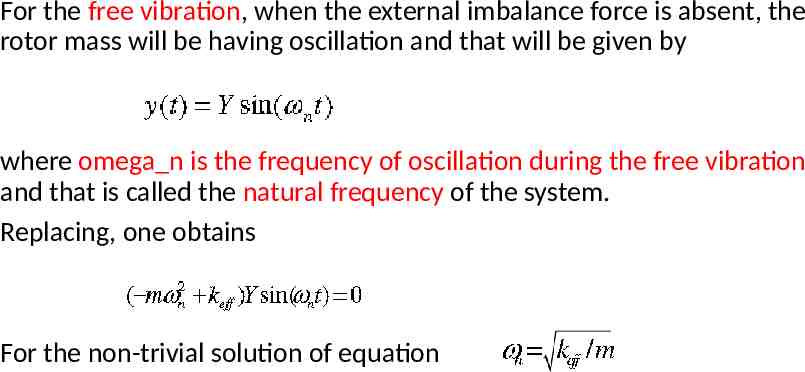
For the free vibration, when the external imbalance force is absent, the rotor mass will be having oscillation and that will be given by where omega n is the frequency of oscillation during the free vibration and that is called the natural frequency of the system. Replacing, one obtains For the non-trivial solution of equation
Steady-state response When the spin speed tends to be equal to the natural frequency of the system, the undamped steady state forced response amplitude tends to infinity. This is a resonance condition and the spin speed corresponding to the resonance is defined as critical speed.
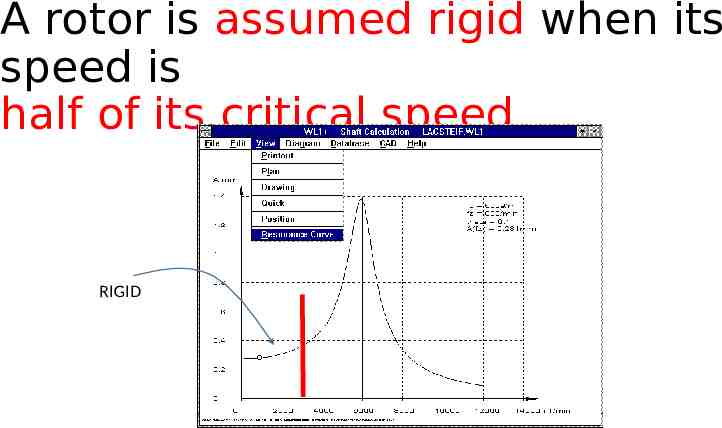
A rotor is assumed rigid when its speed is half of its critical speed RIGID
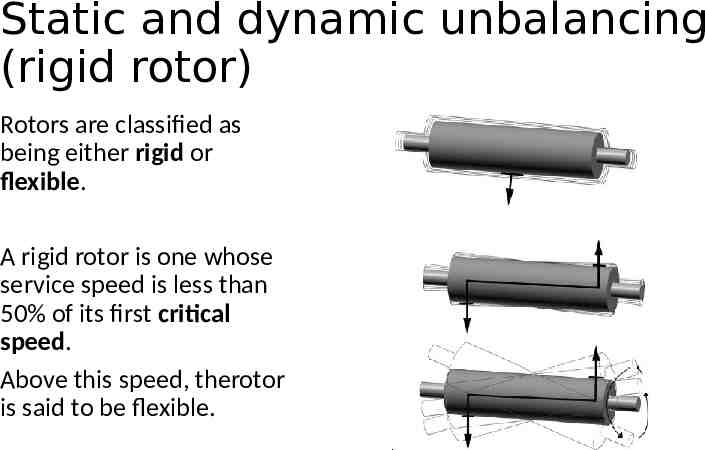
Static and dynamic unbalancing (rigid rotor) Rotors are classified as being either rigid or flexible. A rigid rotor is one whose service speed is less than 50% of its first critical speed. Above this speed, therotor is said to be flexible.
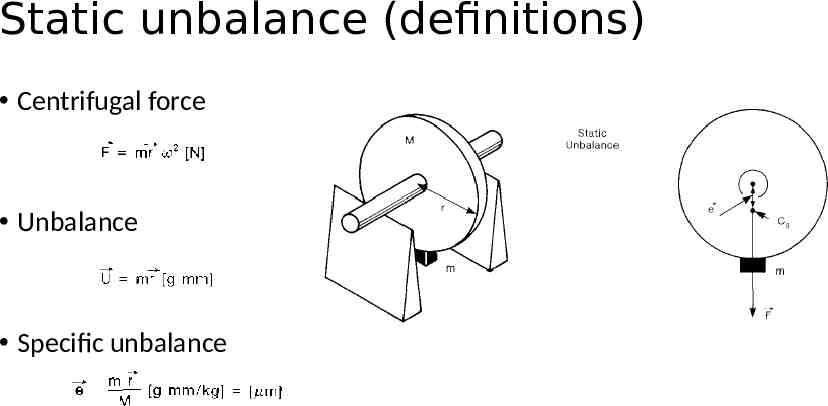
Static unbalance (definitions) Centrifugal force Unbalance Specific unbalance
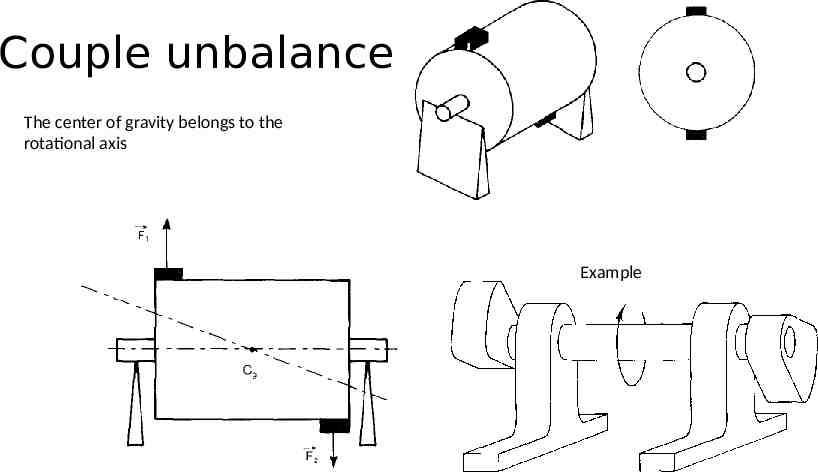
Couple unbalance The center of gravity belongs to the rotational axis Example
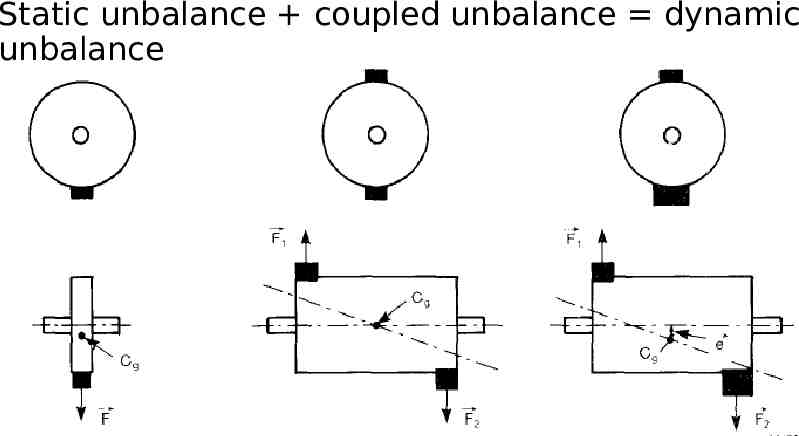
Static unbalance coupled unbalance dynamic unbalance
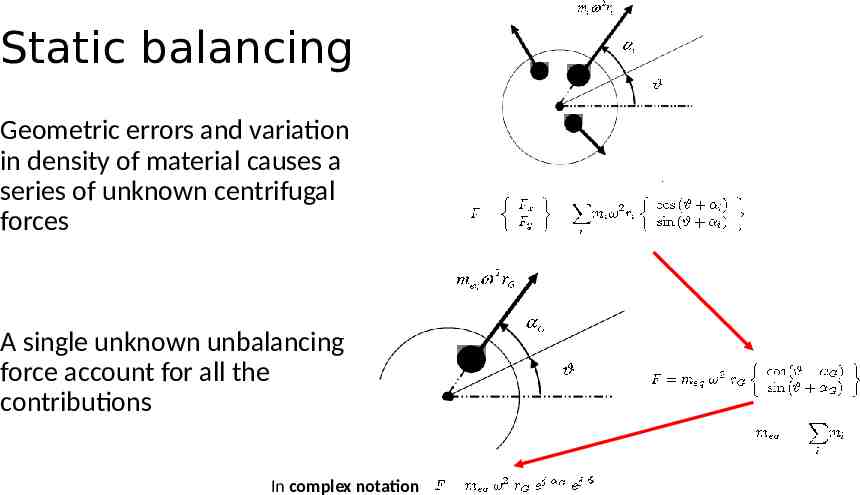
Static balancing Geometric errors and variation in density of material causes a series of unknown centrifugal forces A single unknown unbalancing force account for all the contributions In complex notation
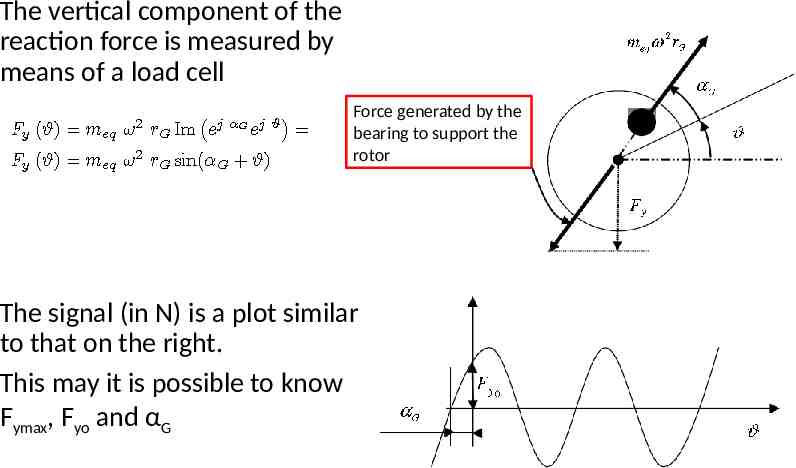
The vertical component of the reaction force is measured by means of a load cell Force generated by the bearing to support the rotor The signal (in N) is a plot similar to that on the right. This may it is possible to know Fymax, Fyo and αG
Example of balancing machines
Instruments needed - An instrument to measure the angular speed - One (for the static balancing) or two (for the dynamic balancing) load cells to measure the vertical components of the reaction forces generated by the supports - A sensor (or a procedure) to calculate the instant when the a mark (or a reference) on the rotor pass through a mark (or a reference) fixed to the inertial frame (see the video Dynamic Balancing.mp4)
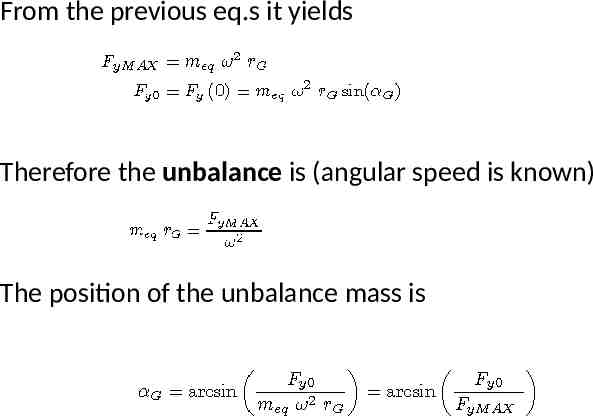
From the previous eq.s it yields Therefore the unbalance is (angular speed is known) The position of the unbalance mass is
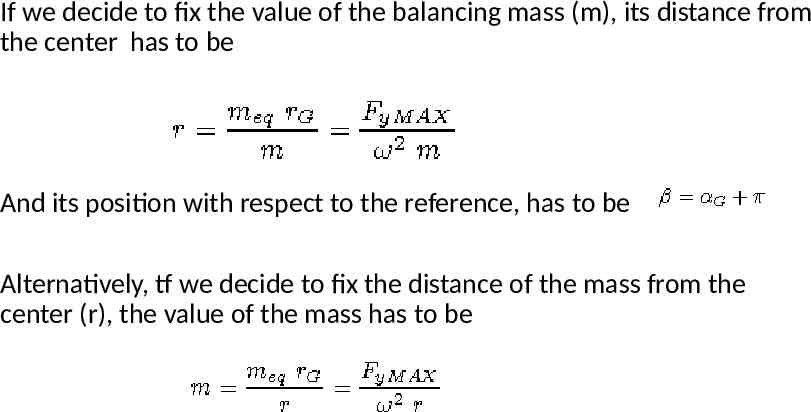
If we decide to fix the value of the balancing mass (m), its distance from the center has to be And its position with respect to the reference, has to be Alternatively, tf we decide to fix the distance of the mass from the center (r), the value of the mass has to be
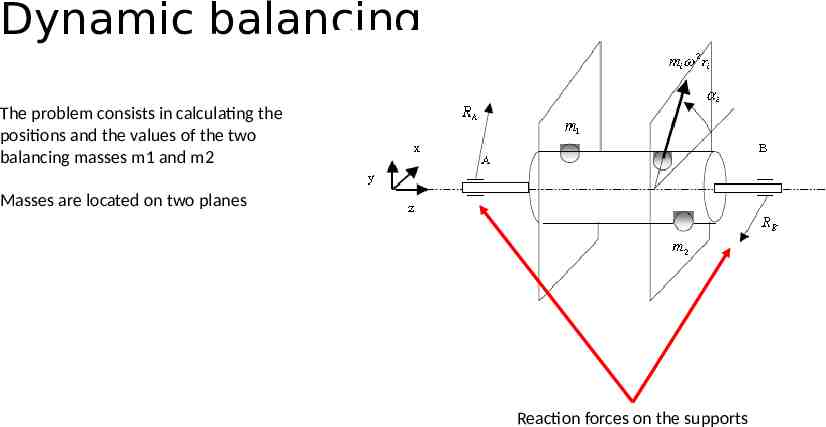
Dynamic balancing The problem consists in calculating the positions and the values of the two balancing masses m1 and m2 Masses are located on two planes Reaction forces on the supports
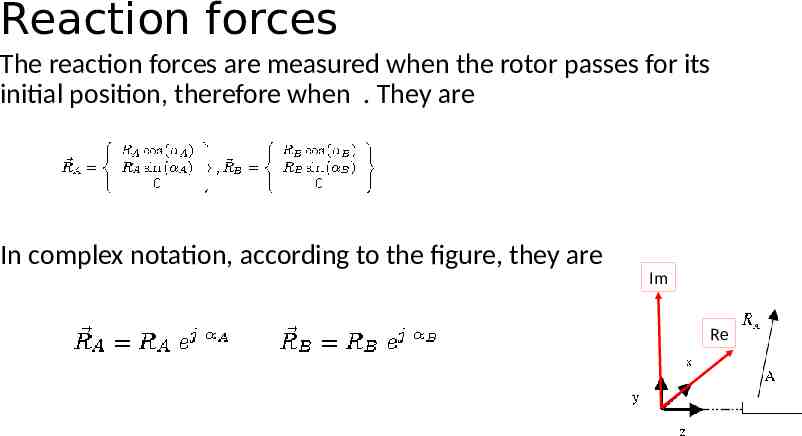
Reaction forces The reaction forces are measured when the rotor passes for its initial position, therefore when . They are In complex notation, according to the figure, they are Im Re
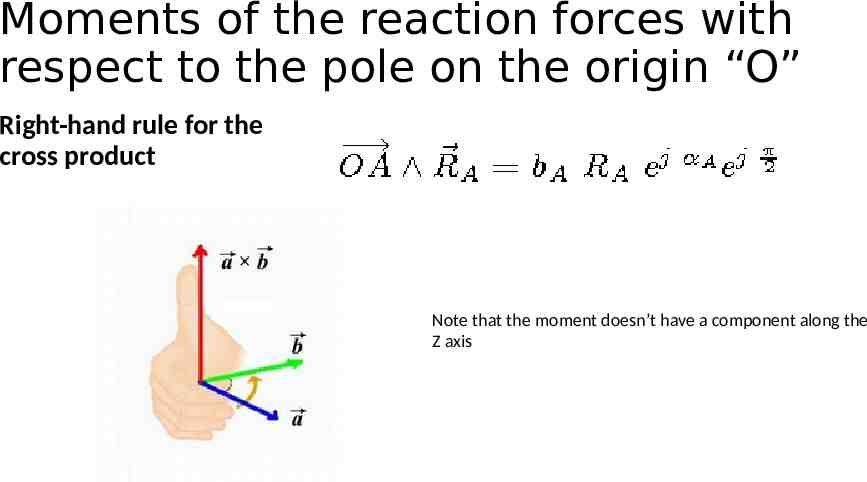
Moments of the reaction forces with respect to the pole on the origin “O” Right-hand rule for the cross product Note that the moment doesn’t have a component along the Z axis
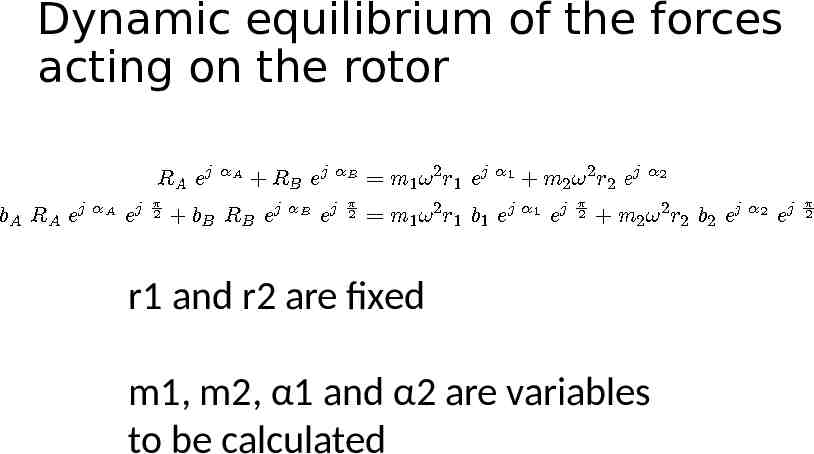
Dynamic equilibrium of the forces acting on the rotor r1 and r2 are fixed m1, m2, α1 and α2 are variables to be calculated
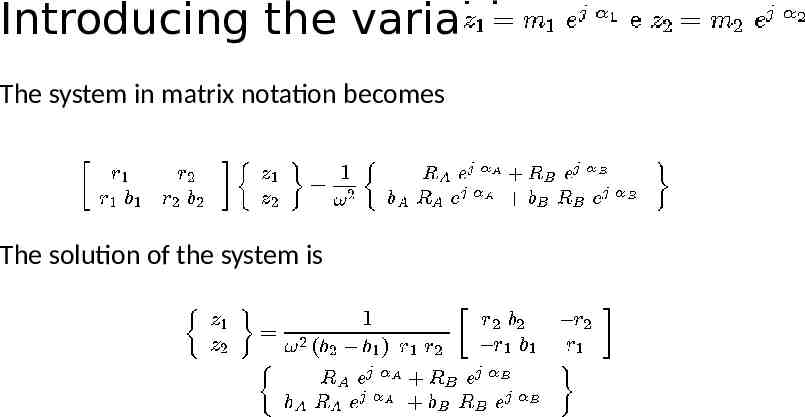
Introducing the variables The system in matrix notation becomes The solution of the system is
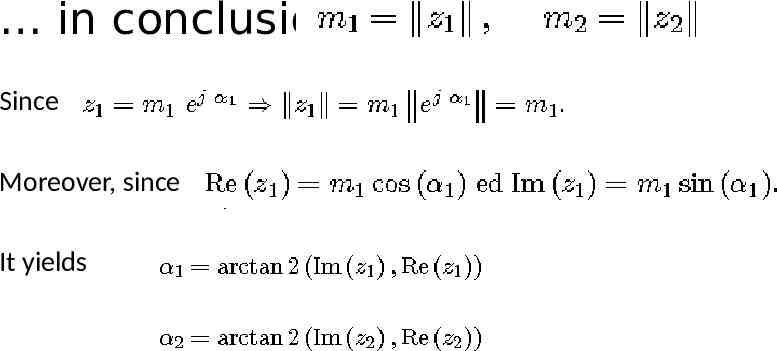
in conclusion Since Moreover, since It yields
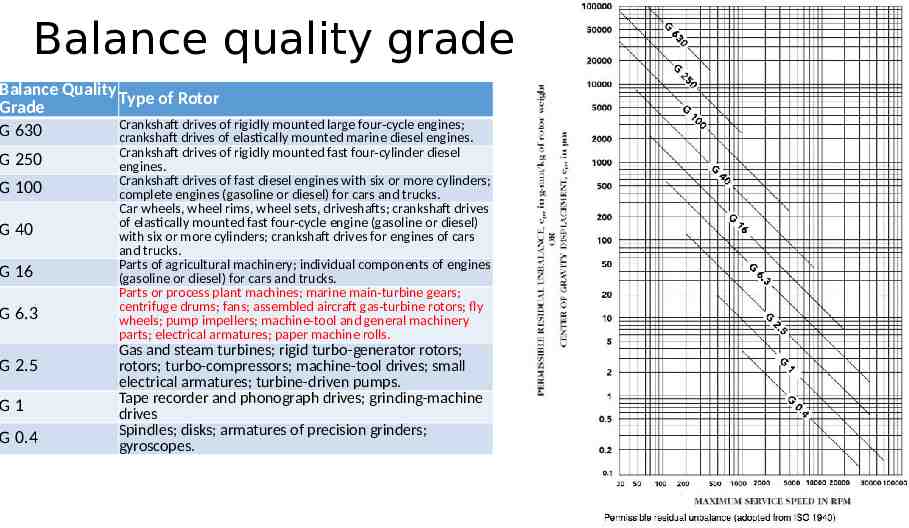
Balance quality grade Balance Quality Type of Rotor Grade Crankshaft drives of rigidly mounted large four-cycle engines; G 630 crankshaft drives of elastically mounted marine diesel engines. G 250 G 100 G 40 G 16 G 6.3 G 2.5 G1 G 0.4 Crankshaft drives of rigidly mounted fast four-cylinder diesel engines. Crankshaft drives of fast diesel engines with six or more cylinders; complete engines (gasoline or diesel) for cars and trucks. Car wheels, wheel rims, wheel sets, driveshafts; crankshaft drives of elastically mounted fast four-cycle engine (gasoline or diesel) with six or more cylinders; crankshaft drives for engines of cars and trucks. Parts of agricultural machinery; individual components of engines (gasoline or diesel) for cars and trucks. Parts or process plant machines; marine main-turbine gears; centrifuge drums; fans; assembled aircraft gas-turbine rotors; fly wheels; pump impellers; machine-tool and general machinery parts; electrical armatures; paper machine rolls. Gas and steam turbines; rigid turbo-generator rotors; rotors; turbo-compressors; machine-tool drives; small electrical armatures; turbine-driven pumps. Tape recorder and phonograph drives; grinding-machine drives Spindles; disks; armatures of precision grinders; gyroscopes.
Multi-plane balancing considerations - Equilibrium of forces along x and y axes Equilibrium of momentum along x and y axes 4 equations For each balancing mass there are two parameters to calculate. Number of balancing masses 2 Use of the pseudoinverse to solve the problem This is not the only possibility (optimization of the non linear problem)
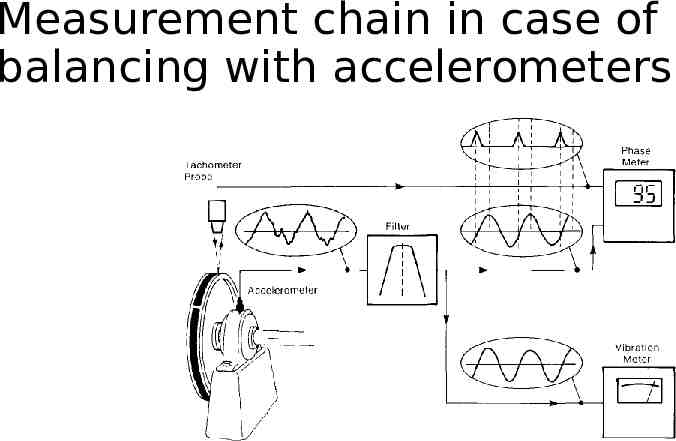
Measurement chain in case of balancing with accelerometers
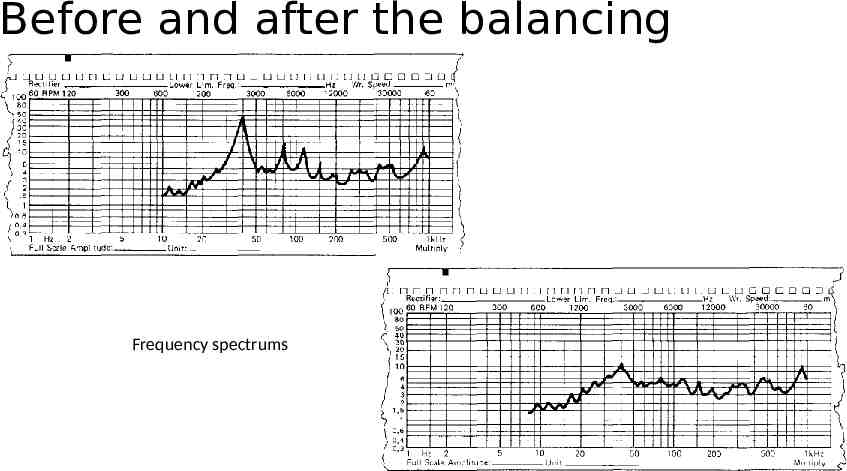
Before and after the balancing Frequency spectrums
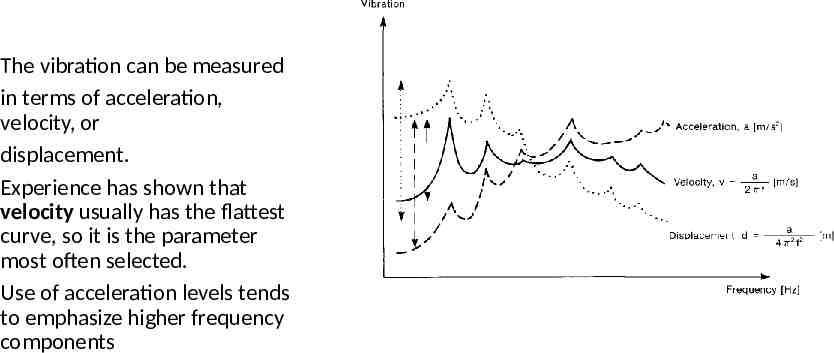
The vibration can be measured in terms of acceleration, velocity, or displacement. Experience has shown that velocity usually has the flattest curve, so it is the parameter most often selected. Use of acceleration levels tends to emphasize higher frequency components