Project Proposal Due 9/21 One or two paragraphs describing what you


80 Slides7.25 MB
Project Proposal Due 9/21 One or two paragraphs describing what you would like to accomplish. A description of the data you think you will need, and whether or not you have access to the data, or will you need to find it or create it? Lecture 4 1
Example 1 My project proposal involves data from a consumer experiment I performed last year. The experiment looks to assess consumer preferences for aquaculture and wild harvested seafood products. Lecture 4 2
The survey was broken up into two components: online and in-person. The online participants have coordinates in decimal degrees linked to their results. The coordinates show the location from where the survey was taken. This would help me to determine if I gathered a representative sample of the coastal United States. The sample size is slightly above 2,000. Lecture 4 3
In addition, there was an in-person aspect of the survey that did not gather coordinate information from the participants, whom all reside in Maine. However, I have the addresses of the participants and plan to geocode their addresses in order to see where people came from in order to take our survey. Lecture 4 4
Example 2 In 2005, The city of New Orleans was hit by one of the deadliest hurricanes(Katrina) in American history. The home of Jazz music was left in shambles as the storm wreaked havoc- leaving behind many dead and a great portion of the city damaged. The perils of hurricane Katrina are still visible as I experienced this firsthand during a service trip to New Orleans in February. Lecture 4 5
Some of the locals where I served shared with me how difficult it was to evacuate from deeply affected areas to places of safety. This left me sad, but also motivated to do something. This project gives partner and I an opportunity to do something. Lecture 4 6
Together, will be studying the coastland wetlands in New Orleans to identify the areas that’re most likely to be affected by a hurricane or flood event. We will then design an evacuation plan around the city of New Orleans. The identification of the areas with the highest threat along with the evacuation plan will be done & displayed in Arc Map. Our next step will be to use 3D maps as well as simple maps to display the evacuation plan. Lecture 4 7
Ch. 3 Problems 3.5 Provide three reasons why there have been various estimates for the Earth’s ellipsoidal radii. 3.6 Define the geoid. Tell how it differs from the ellipsoid, and from the surface of the Earth. Describe how we measure the position of the geoid. 3.7 Define a parallel or meridian in a geographic system. Describe where the zero line occurs. Lecture 4 8
3.9 Define a datum. Describe how datums are developed. 3.10 Why are there multiple datums , even for the same place on Earth. Define what we mean when we say datum shift. 3.22 What is a developable surface. What are the most common shapes for a developable surface? 3.28 Define and describe the UTM coordinate system. Lecture 4 9
What type of developable surface is used with the a UTM projection. What are UTM zones, where is the origin of a zone, and how are negative coordinates avoided? 3.29 What is a datum transformation? How does it differ from a map projection? Lecture 4 10
Maps & Data Entry Chapter 4 – pp 147-170 Lecture 4 11
Spatial Data Hard Copy –drawn, written or printed documents, including survey measurements and legal documents. Digital data – are in computer compatible form – A considerable amount of digital data has been converted from hardcopy sources. – Today a lot of digital data is also collected digitally. Lecture 4 12
Analogue vs. Digital Data Analogue (hardcopy) – Paper maps – Tables of statistics – Hard copy aerial photographs Digital data is already in computer readable format and can come from a variety of sources: – The internet – Digital imagery – Data collection devices If data were all in the same format, type, scale and resolution, encoding would be simple. Lecture 4 13
Lecture 4 14
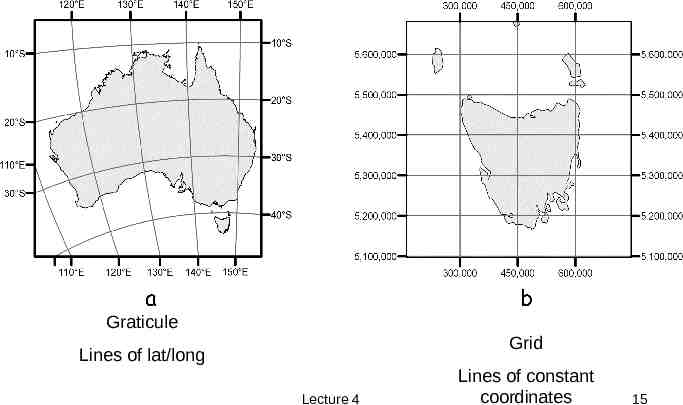
Graticule Grid Lines of lat/long Lecture 4 Lines of constant coordinates 15
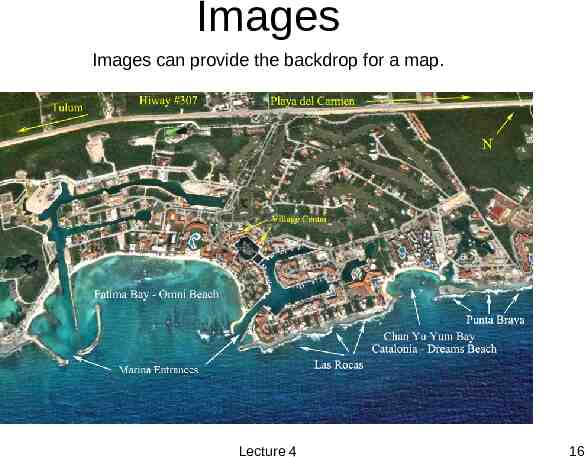
Images Images can provide the backdrop for a map. Lecture 4 16
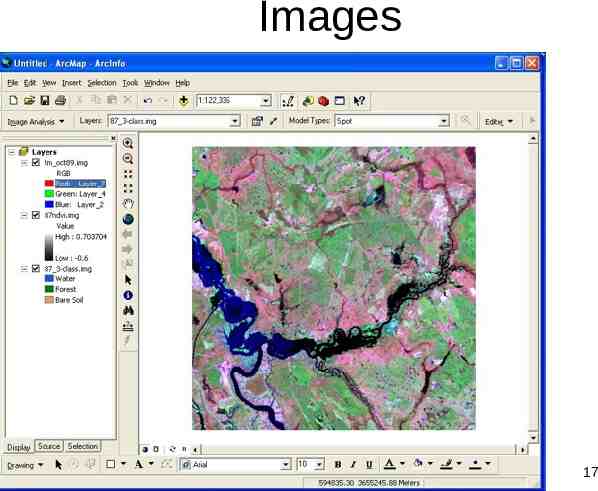
Images Lecture 4 17
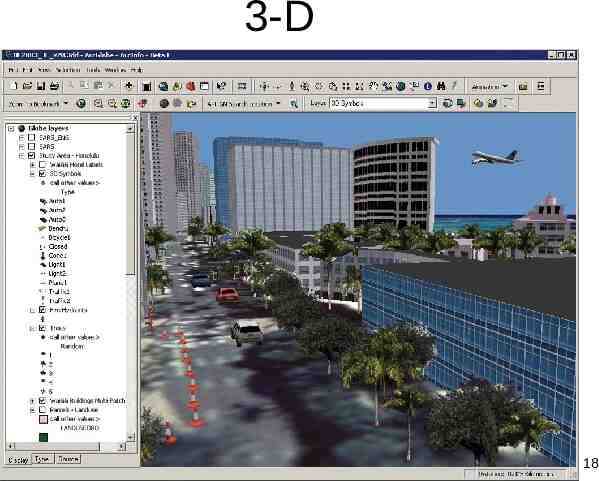
3-D Lecture 4 18
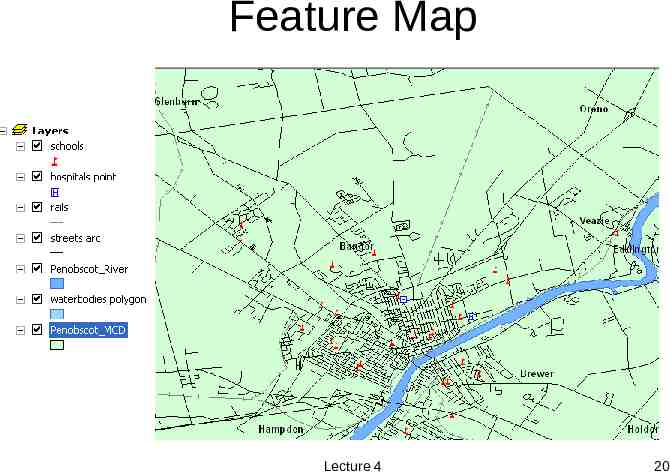
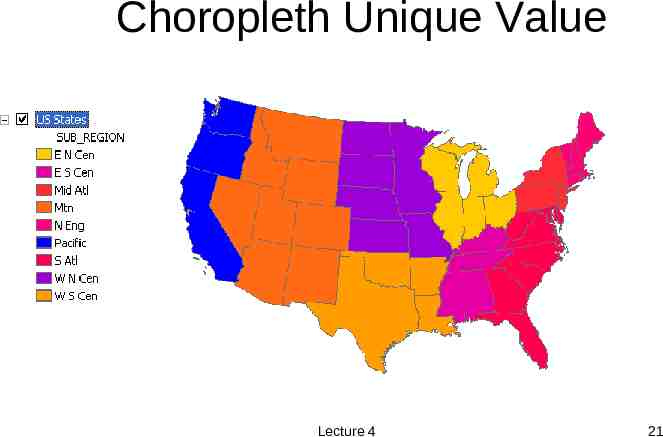
Types of Maps There are many different types of maps. The four most common are: – Feature maps are the simplest as they map points lines or areas. – Choropleth maps depict quantitative information for areas. – Dot-density maps also depict quantitative information. – Isopleth maps/contour maps display lines of equal value. Lecture 4 19
Feature Map Lecture 4 20
Choropleth Unique Value Lecture 4 21
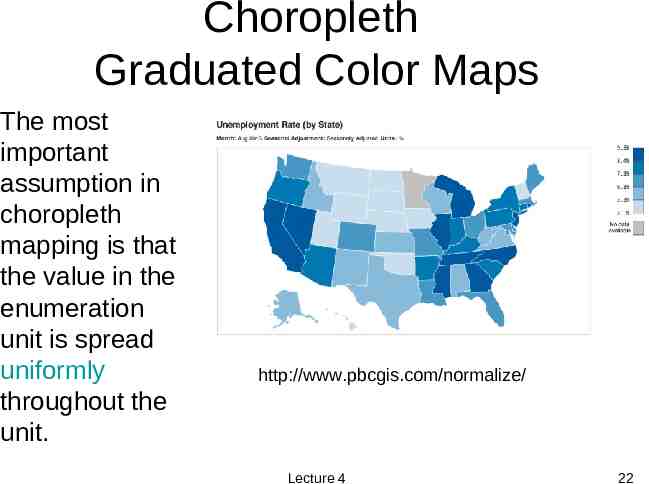
Choropleth Graduated Color Maps The most important assumption in choropleth mapping is that the value in the enumeration unit is spread uniformly throughout the unit. http://www.pbcgis.com/normalize/ Lecture 4 22
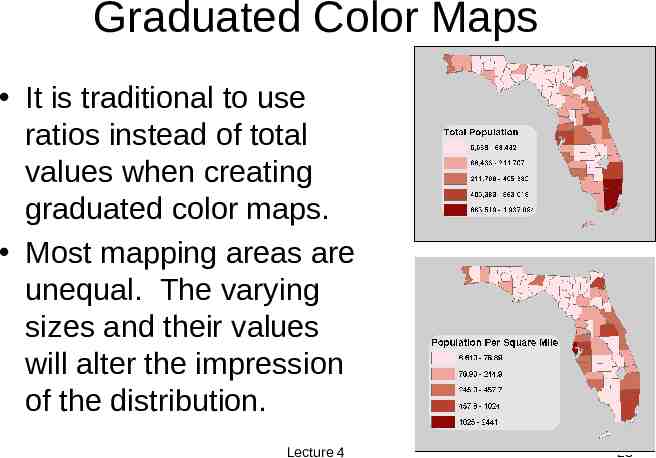
Graduated Color Maps It is traditional to use ratios instead of total values when creating graduated color maps. Most mapping areas are unequal. The varying sizes and their values will alter the impression of the distribution. Lecture 4 23
Proportional and Graduated Symbol Maps Guidelines – Circles are the most common symbol used due to the ease with which they are interpreted. – All symbols should generally be the same color. – The difference between the largest and smallest symbols should be great enough to show differences in data values. – Largest symbols should not overlap so much that they obscure patterns on the map. Lecture 4 24
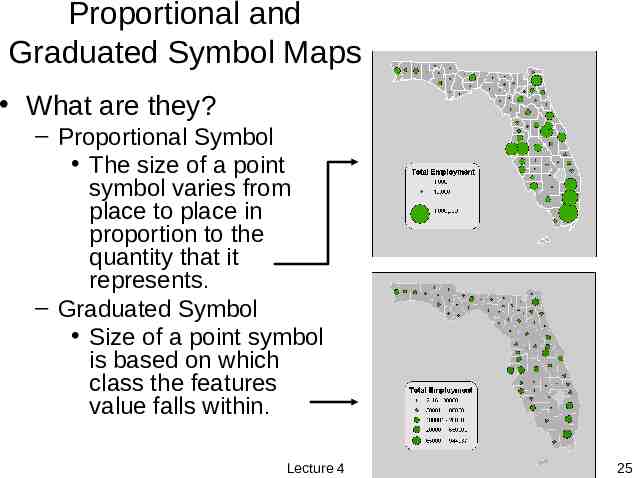
Proportional and Graduated Symbol Maps What are they? – Proportional Symbol The size of a point symbol varies from place to place in proportion to the quantity that it represents. – Graduated Symbol Size of a point symbol is based on which class the features value falls within. Lecture 4 25
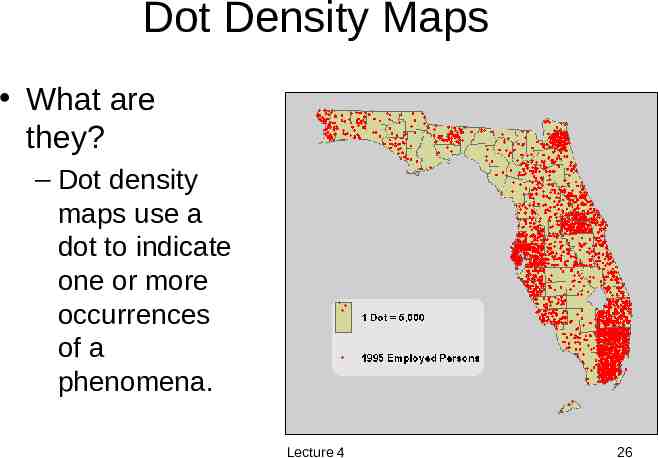
Dot Density Maps What are they? – Dot density maps use a dot to indicate one or more occurrences of a phenomena. Lecture 4 26
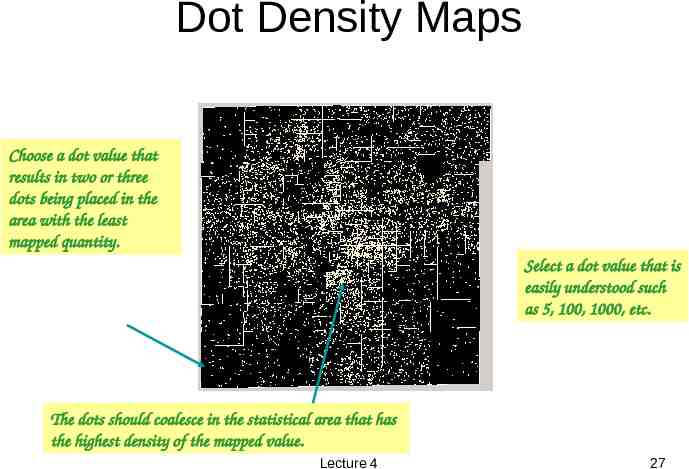
Dot Density Maps Choose a dot value that results in two or three dots being placed in the area with the least mapped quantity. Select a dot value that is easily understood such as 5, 100, 1000, etc. The dots should coalesce in the statistical area that has the highest density of the mapped value. Lecture 4 27
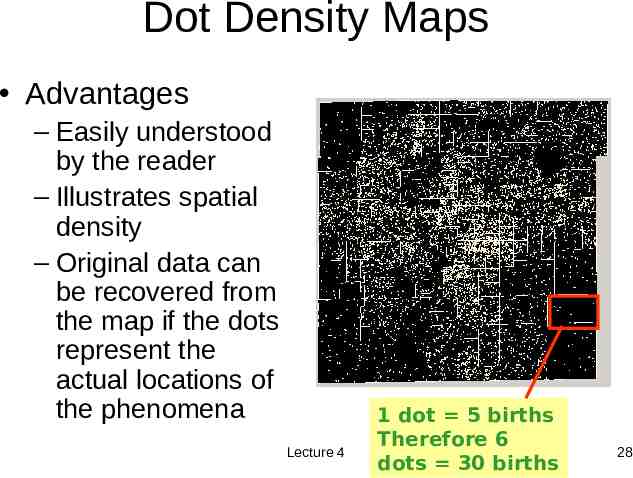
Dot Density Maps Advantages – Easily understood by the reader – Illustrates spatial density – Original data can be recovered from the map if the dots represent the actual locations of the phenomena Lecture 4 1 dot 5 births Therefore 6 dots 30 births 28
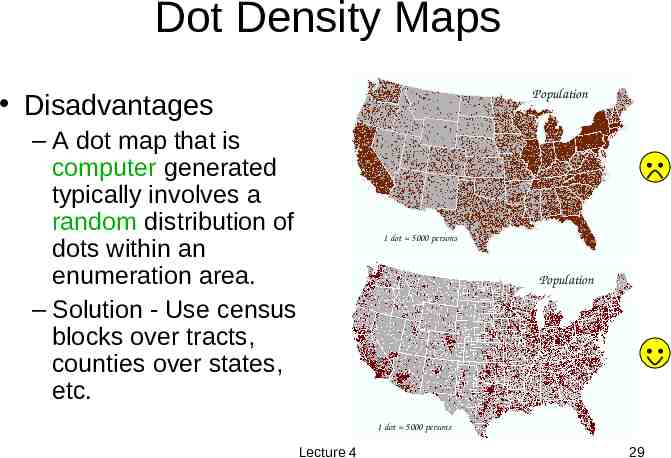
Dot Density Maps Disadvantages Population – A dot map that is computer generated typically involves a random distribution of dots within an enumeration area. – Solution - Use census blocks over tracts, counties over states, etc. 1 dot 5000 persons Population 1 dot 5000 persons Lecture 4 29
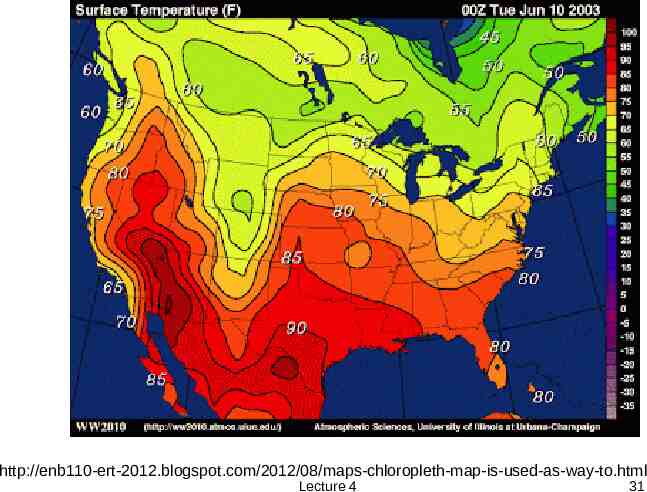
Isopleth Maps Isopleth maps are used to visualize phenomena that are conceptualized as fields, and measured on an interval or ratio scale. We can, however, also color them in such a way as to represent ordinal and nominal data as well. Lecture 4 30
http://enb110-ert-2012.blogspot.com/2012/08/maps-chloropleth-map-is-used-as-way-to.html Lecture 4 31
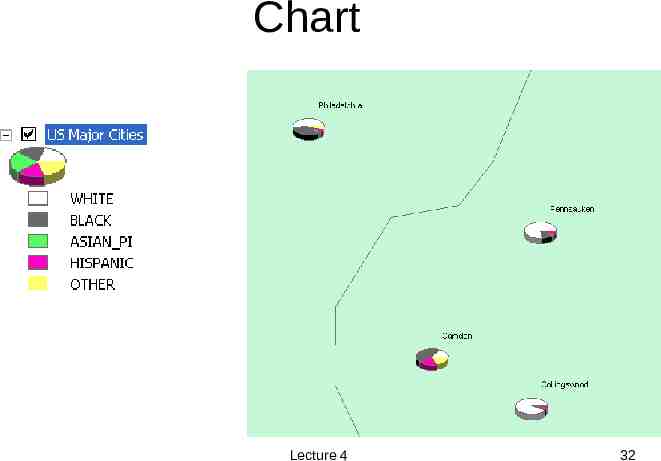
Chart Lecture 4 32
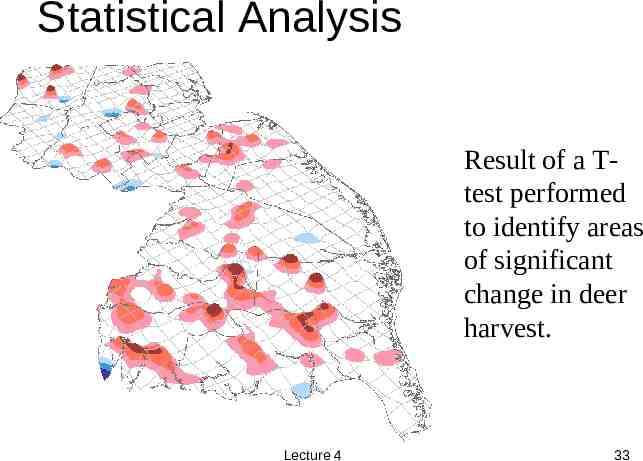
Statistical Analysis Result of a Ttest performed to identify areas of significant change in deer harvest. Lecture 4 33
Map Scale The amount of reduction that takes place in going from real-world dimensions to the new mapped area on the map plane. Map scale is unambiguous on hardcopy maps, but a fixed scale makes no sense on a digital document when you can zoom in and out. Types of map scales: verbal vs bar Lecture 4 34
Verbal Scales One foot equals 24000 feet One inch equals one mile Useful for a quick sense of ground units in familiar units. Unreliable, subject to misinterpretation, invalidated by reduction and enlargement. Lecture 4 35
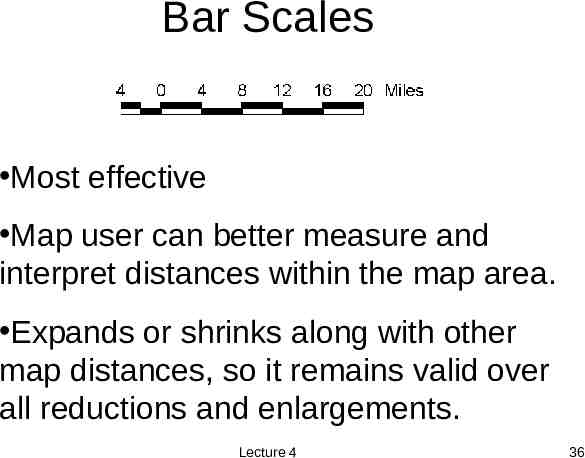
Bar Scales Most effective Map user can better measure and interpret distances within the map area. Expands or shrinks along with other map distances, so it remains valid over all reductions and enlargements. Lecture 4 36
Map Generalization Maps are abstractions of reality. This abstraction introduces map generalization, the approximation of features. Lecture 4 37
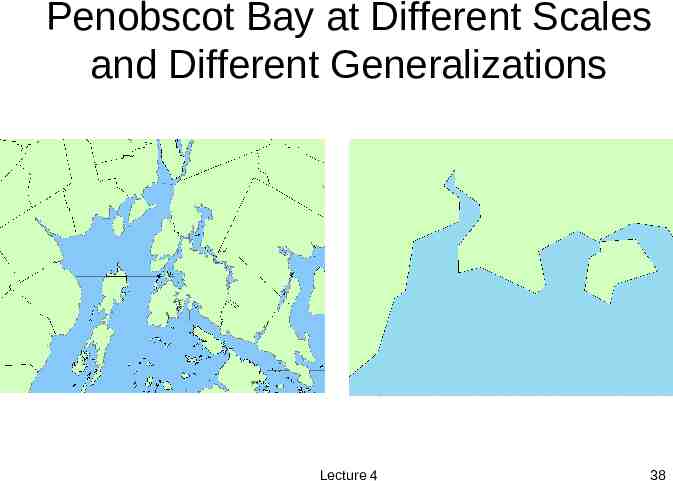
Penobscot Bay at Different Scales and Different Generalizations Lecture 4 38
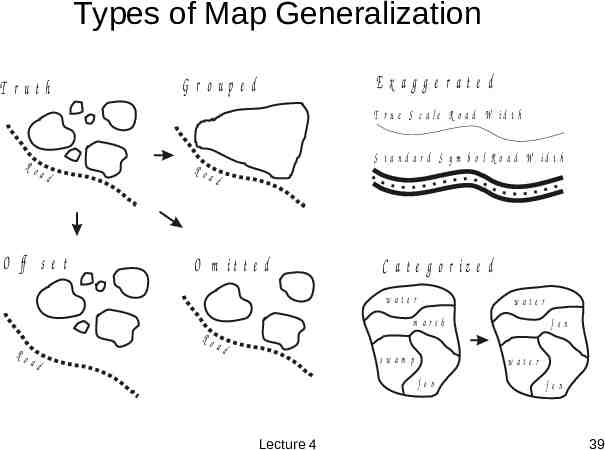
Types of Map Generalization T ruth Exaggerated Grouped T r u e S c a le R o a d W id t h Ro ad O ff s e t S t a n d a r d S y m b o l R o a d W id t h Ro ad O m it t e d C a t e g o r iz e d water water m arsh Ro ad Ro ad swam p water fen Lecture 4 fen fen 39
Map Boundaries Hard copy maps have edges, and discontinuities often occur at edges. Most digital maps have been digitized from hardcopy maps so edge discontinuities have been carried into the present. These errors are being corrected as newer data are being collected by digital means. Differences in time of data collection for different map sheets can also cause errors at the edges. Lecture 4 40
Spatial Data Input from Hardcopy Sources Common Input Methods: keyboard entry manual digitizing automatic digitizing scanning format conversion Lecture 4 41
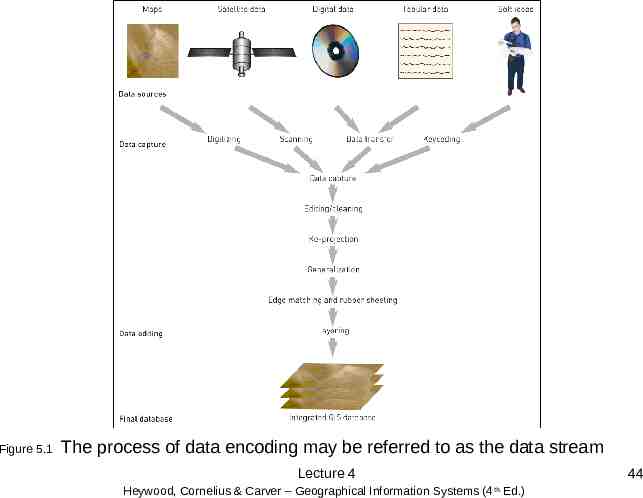
Data Encoding The process of getting data into the computer. Spatial data – Different sources – Different formats – Input via different methods As a result, GIS data must be corrected or manipulated to be sure they can be structured according to the desired data model. Lecture 4 42
Problems to Be Addressed Reformatting Reprojection Generalization of complex data Edge matching of adjacent map sheets Lecture 4 43
Figure 5.1 The process of data encoding may be referred to as the data stream Lecture 4 44 Heywood, Cornelius & Carver – Geographical Information Systems (4 Ed.) th
Tabular Data Attribute data Spatial data – Coordinate data Add x,y data – it comes in as an event theme Export to shapefile or feature class – Address data (requires a road file) Geocoding converts addresses to x,y data Lecture 4 45
Geocoding Geocoding is the process of finding associated geographic coordinates (often expressed as lat/long) from other geographic data. Address matching is the most common form of geocoding. Lecture 4 46
Applications of Geocoding Internet Services: Google, Yahoo, Mapquest Business: market/area analysis, real estate Emergency Services Crime Analysis Public Health Services Lecture 4 47
Manual Digitizing Tracing the location of “important” coordinates Done from an image or map source Lecture 4 48
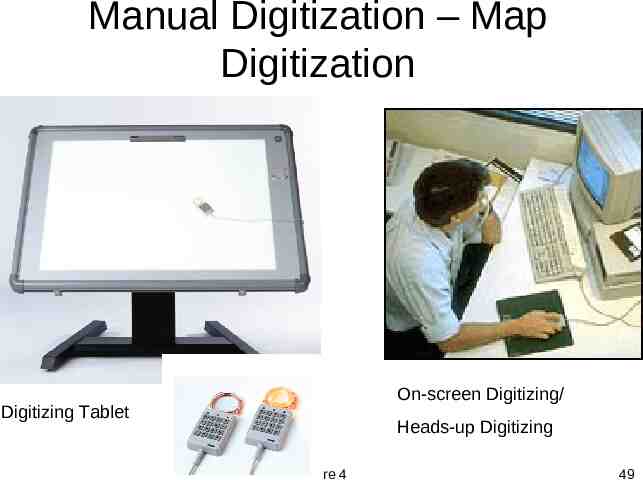
Manual Digitization – Map Digitization On-screen Digitizing/ Digitizing Tablet Heads-up Digitizing Lecture 4 49
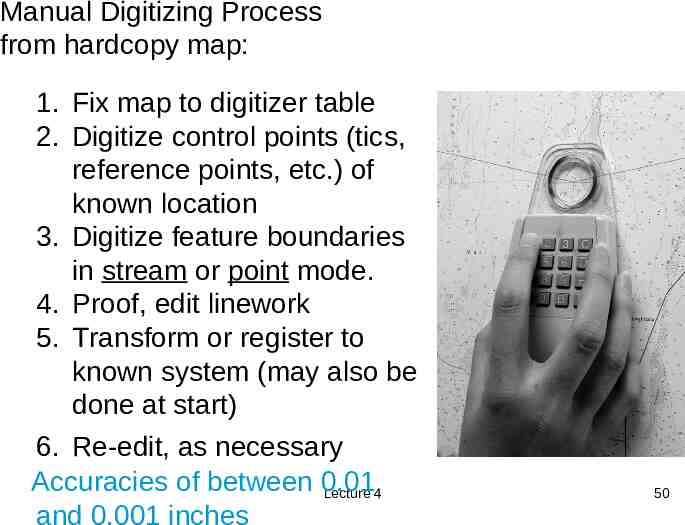
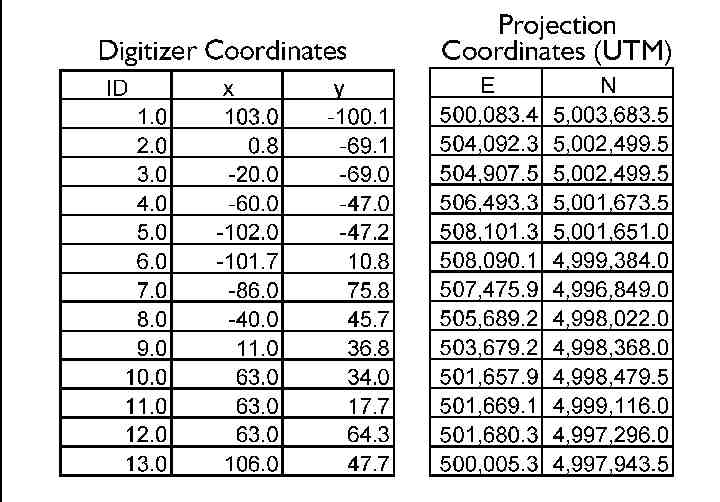
Manual Digitizing Process from hardcopy map: 1. Fix map to digitizer table 2. Digitize control points (tics, reference points, etc.) of known location 3. Digitize feature boundaries in stream or point mode. 4. Proof, edit linework 5. Transform or register to known system (may also be done at start) 6. Re-edit, as necessary Accuracies of between 0.01 Lecture 4 and 0.001 inches 50
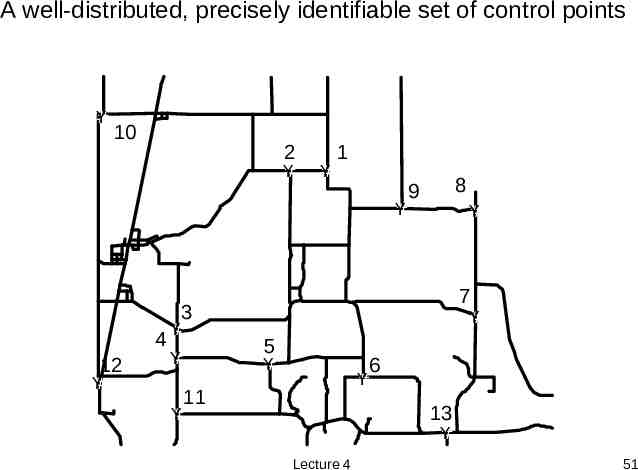
A well-distributed, precisely identifiable set of control points Y # 10 2 Y # Y # 1 8 9 Y # Y # 7 3 4 12 Y # Y # Y # Y # 5 6 Y # Y # 11 13 Y # Y # Lecture 4 51
Lecture 4 52
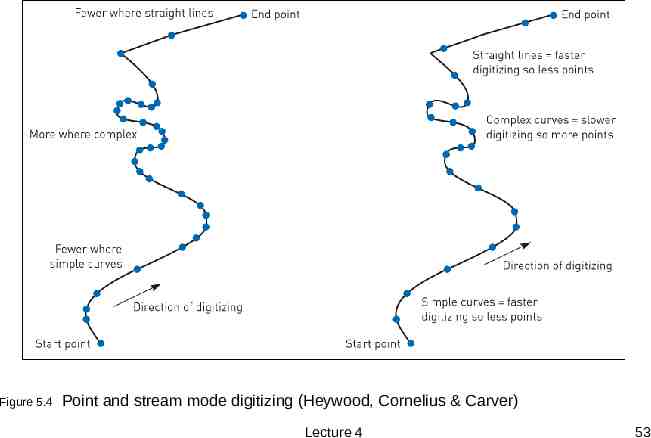
Figure 5.4 Point and stream mode digitizing (Heywood, Cornelius & Carver) Lecture 4 53
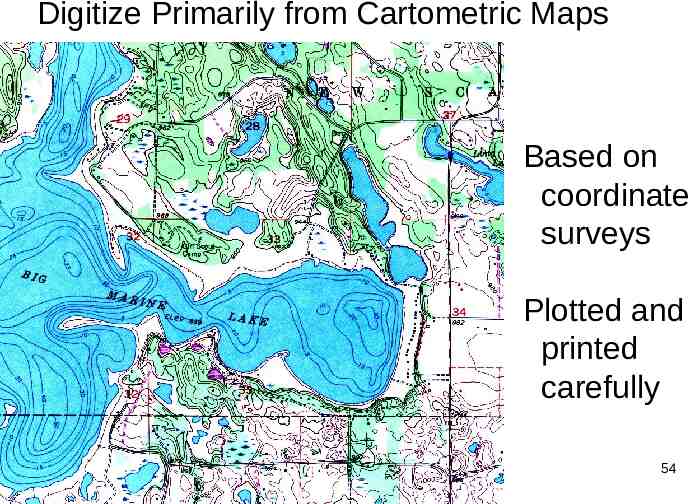
Digitize Primarily from Cartometric Maps Based on coordinate surveys Plotted and printed carefully Lecture 4 54
Manual Map Digitization, Pros and Cons Advantages low cost poor quality maps (much editing, interpretation) short training intervals ease in frequent quality testing device ubiquity Disdvantages upper limit on precision poor quality maps (much editing, interpretation) short training intervals ease in frequent quality testing device ubiquity Lecture 4 55
DATA SOURCES, INPUT, AND OUTPUT Problems with source maps: Dimensional stability (shrink, swell, folds) Boundary or tiling problems Maps are abstractions of Reality Features are generalized: classified (e.g., not all wetlands are alike) simplified (lakes, streams, and towns in a scale example) moved (offsets in plotting) exaggerated (buildings, line roadwidths, etc). Lecture 4 56
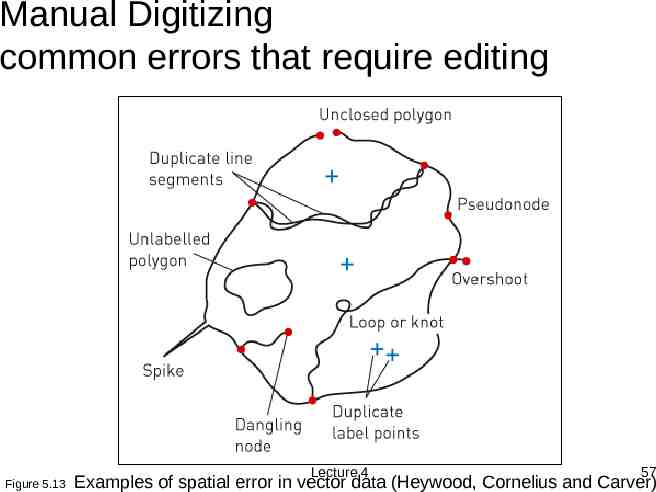
Manual Digitizing common errors that require editing Figure 5.13 Lecture 4 57 Examples of spatial error in vector data (Heywood, Cornelius and Carver)
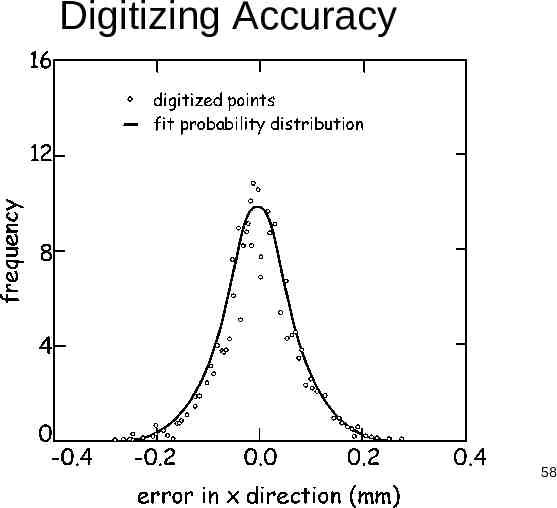
Digitizing Accuracy Lecture 4 58
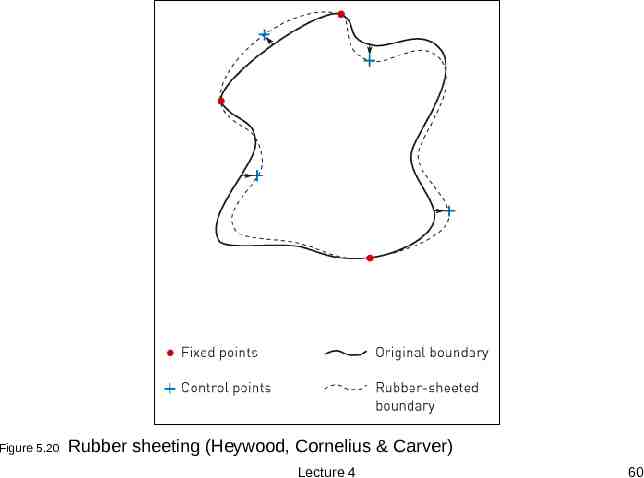
Editing Manual editing: Line and point locations are adjusted on a graphic display, pointing and clicking with a mouse or keyboard. Most controlled, most time-consuming . Interactive rubbersheeting: Anchor points are selected, again on the graphics screen, and other points selected and dragged around the screen. All lines and points except the anchor points are interactively adjusted. Lecture 4 59
Figure 5.20 Rubber sheeting (Heywood, Cornelius & Carver) Lecture 4 60
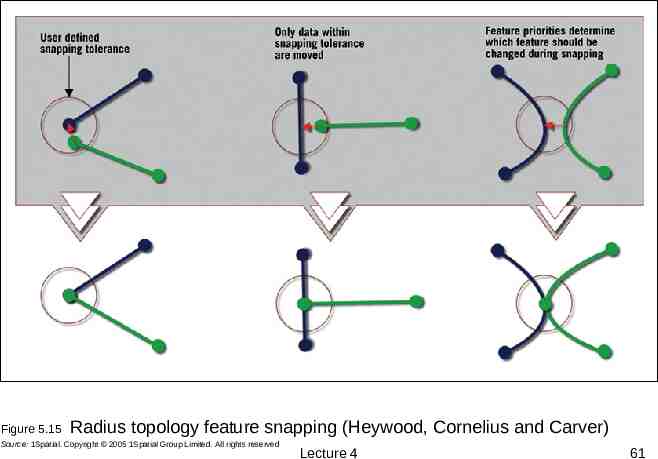
Figure 5.15 Radius topology feature snapping (Heywood, Cornelius and Carver) Source: 1Spatial. Copyright 2005 1Spatial Group Limited. All rights reserved Lecture 4 61
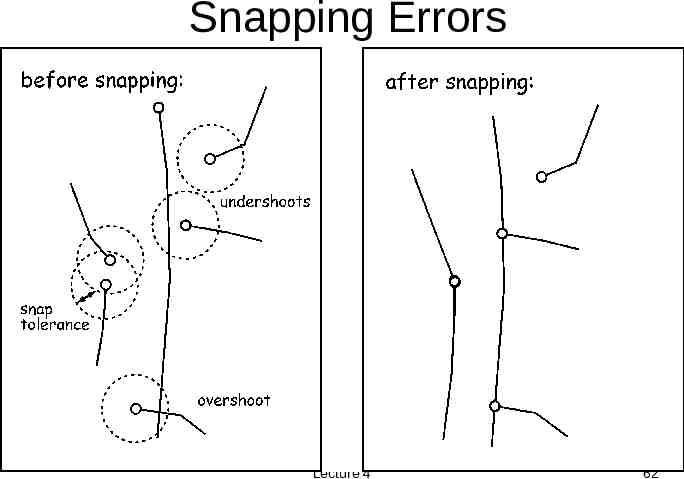
Snapping Errors Lecture 4 62
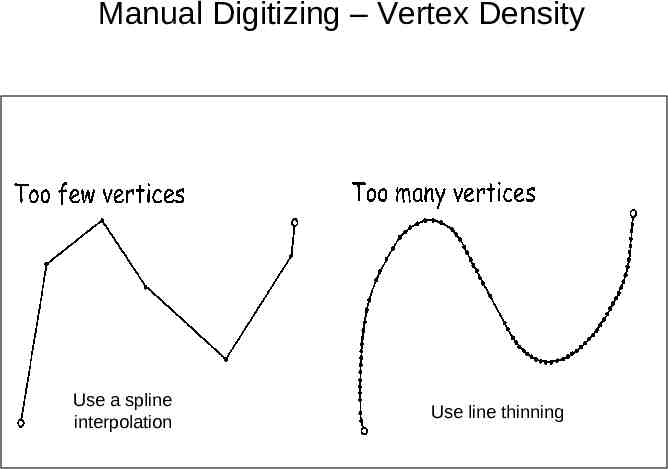
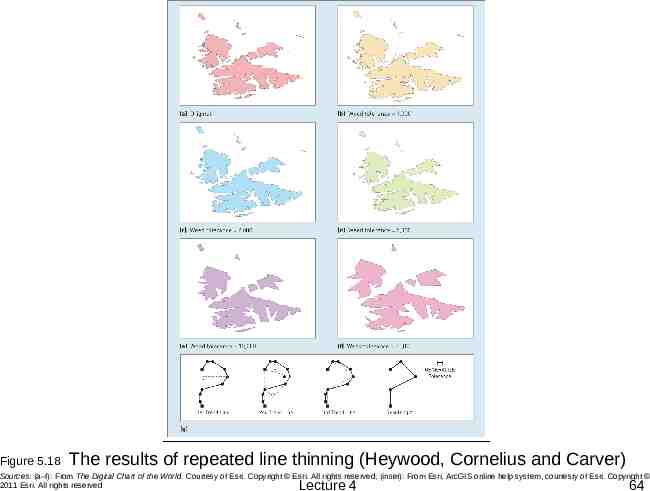
Manual Digitizing – Vertex Density Use a spline interpolation Use line thinning Lecture 4 63
Figure 5.18 The results of repeated line thinning (Heywood, Cornelius and Carver) Sources: (a–f): From The Digital Chart of the World. Courtesy of Esri. Copyright Esri. All rights reserved; (inset): From Esri, ArcGIS online help system, courtesty of Esri. Copyright 2011 Esri. All rights reserved Lecture 4 64
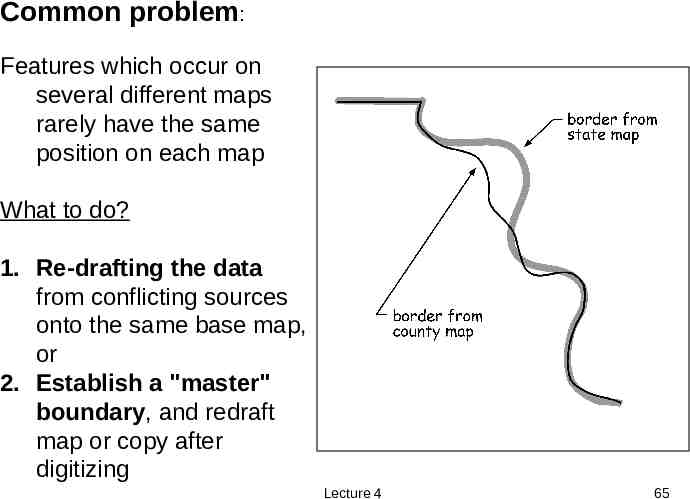
Common problem: Features which occur on several different maps rarely have the same position on each map What to do? 1. Re-drafting the data from conflicting sources onto the same base map, or 2. Establish a "master" boundary, and redraft map or copy after digitizing Lecture 4 65
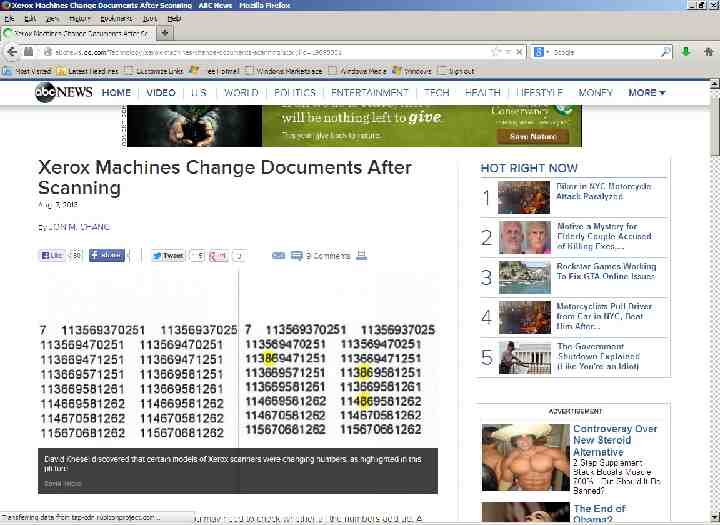
Digitizing Maps - Automated Scanners Main alternative to manual digitizing for hardcopy maps Range of scanner qualities, geometric fidelity should be verified Most maps are now available digitally – however many began life as paper maps Lecture 4 66
Figure 5.7 Types of scanner Sources: (a) Epson (UK) Ltd used by permission; (b) Stefan Kuhn, www.webkuehn.de; (c) Colortrac, www.colortrac.com Lecture 4 67 (Heywood, Cornelius and Carver)
Practical Problems of Scanning Optical distortion from flatbed scanners. Unwanted scanning of handwritten information. The selection of appropriate scanning tolerances. The format of files produced for GIS input The amount of editing required to produce data suitable for analysis. Lecture 4 68
Lecture 4 69
Digitizing Maps - Automated Scanners Suitable threshholding allows determination of line or point features from the hardcopy map. Scanners work best when very clean map materials are available. Significant editing still required (thinning, removing unwanted features) Lecture 4 70
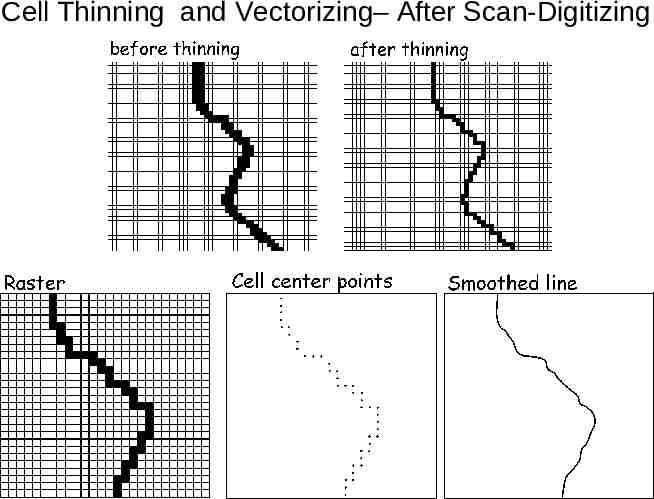
Cell Thinning and Vectorizing– After Scan-Digitizing Lecture 4 71
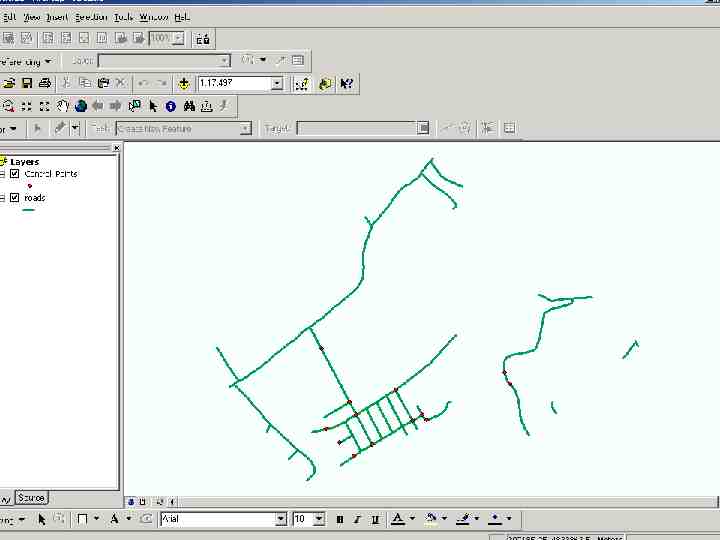
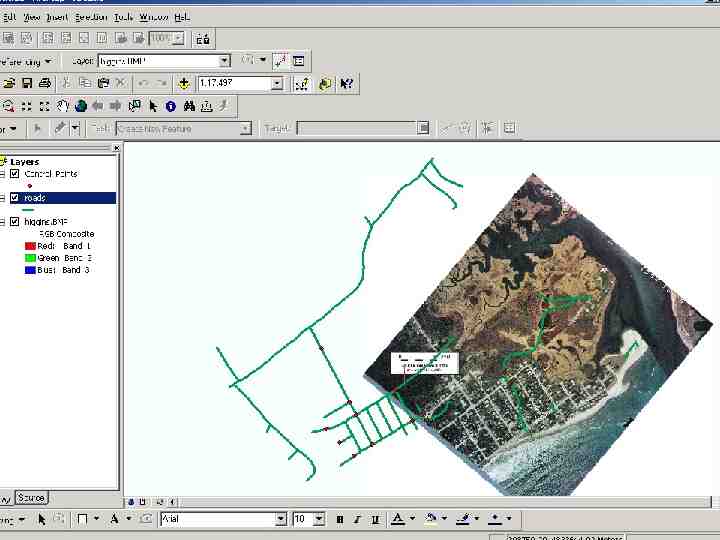
Georeferencing In order to display images with coverages or shapefiles, it is necessary to establish an image-to-world transformation that converts the image coordinates to realworld coordinates. This transformation information is typically stored with the image. Lecture 4 72
Lecture 4 73
Lecture 4 74
Lecture 4 75
Lecture 4 76
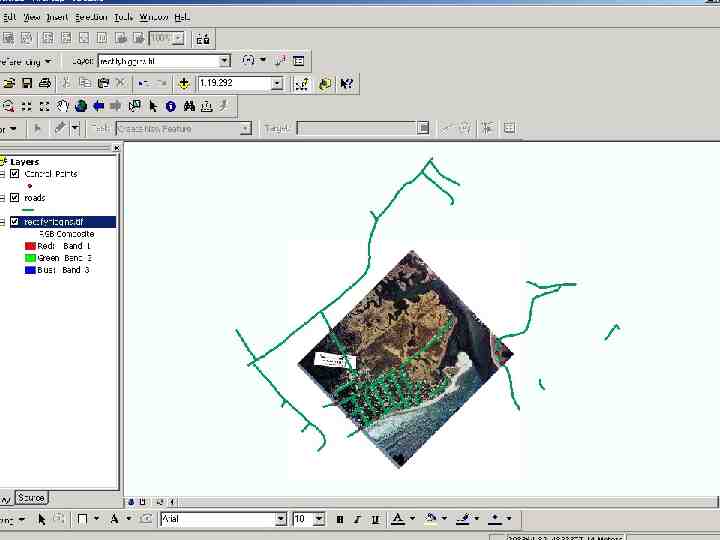
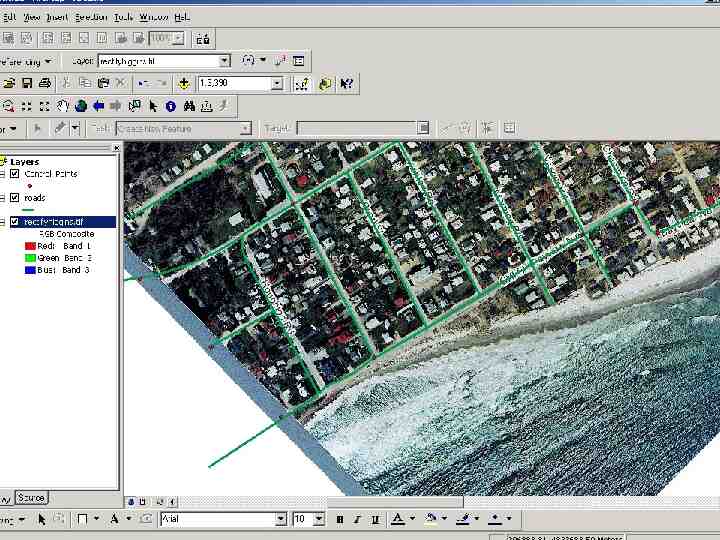
Rectified Image GeoTiff - store the georeferencing information in the header of the image file. ArcView uses this information if it is present. World Files - However, other image formats store this information in a separate ASCII file. This file is generally referred to as the world file, since it contains the real-world transformation information used by the image. World files can be created with any editor. Lecture 4 77
World Files It’s easy to identify the world file which should accompany an image file: world files use the same name as the image, with a "w" appended. For example, the world file for the image file mytown.tiff would be called mytown.tiffw or mytown.wtf Lecture 4 78
The Contents of the World File 20.17541308822119 (x-scale factor) 0.00000000000000 (rotation) 0.00000000000000 (rotation) -20.17541308822119 (y-scale factor) 424178.11472601280548 (x-translation) 4313415.90726399607956 (y-translation) When this file is present, ArcView performs the image-to-world transformation. Lecture 4 79
Assignment Read Ch. 4 to page 170 Try problems: 1, 3, 4, 9 12 Lecture 4 80