Lecture 11: Code Optimization CS 540 George Mason University































58 Slides293.50 KB
Lecture 11: Code Optimization CS 540 George Mason University
Code Optimization REQUIREMENTS: Meaning must be preserved (correctness) Speedup must occur on average. Work done must be worth the effort. OPPORTUNITIES: Programmer (algorithm, directives) Intermediate code Target code CS 540 Spring 2009 GMU 2
Code Optimization Source language Scanner (lexical analysis) tokens Parser (syntax analysis) Syntactic structure Syntactic/semantic structure Semantic Analysis (IC generator) Code Generator Target language Code Optimizer Symbol Table CS 540 Spring 2009 GMU 3
Levels Window – peephole optimization Basic block Procedural – global (control flow graph) Program level – intraprocedural (program dependence graph) CS 540 Spring 2009 GMU 4
Peephole Optimizations Constant Folding becomes x : 32 x : x 32 x : 64 Unreachable Code goto L2 x : x 1 unneeded Flow of control optimizations goto L1 L1: goto L2 becomes goto L2 CS 540 Spring 2009 GMU 5
Peephole Optimizations Algebraic Simplification x : x 0 unneeded Dead code x : 32 where x not used after statement y : x y y : y 32 Reduction in strength x : x * 2 x : x x CS 540 Spring 2009 GMU 6
Peephole Optimizations Local in nature Pattern driven Limited by the size of the window CS 540 Spring 2009 GMU 7
Basic Block Level Common Subexpression elimination Constant Propagation Dead code elimination Plus many others such as copy propagation, value numbering, partial redundancy elimination, CS 540 Spring 2009 GMU 8
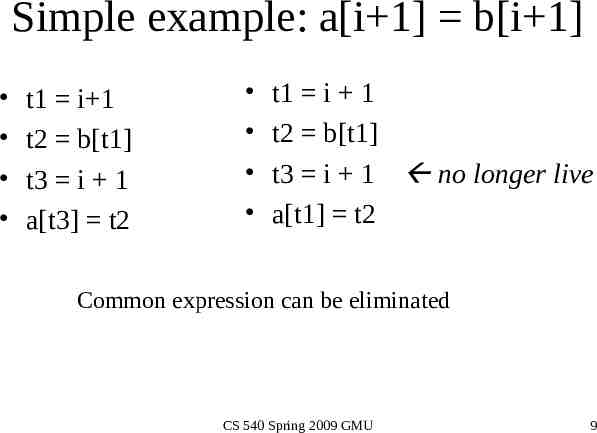
Simple example: a[i 1] b[i 1] t1 i 1 t2 b[t1] t3 i 1 a[t3] t2 t1 i 1 t2 b[t1] t3 i 1 no longer live a[t1] t2 Common expression can be eliminated CS 540 Spring 2009 GMU 9
Now, suppose i is a constant: i 4 t1 i 1 t2 b[t1] a[t1] t2 Final Code: i 4 t1 5 t2 b[t1] a[t1] t2 i 4 t1 5 t2 b[5] a[5] t2 i 4 t2 b[5] a[5] t2 CS 540 Spring 2009 GMU 10
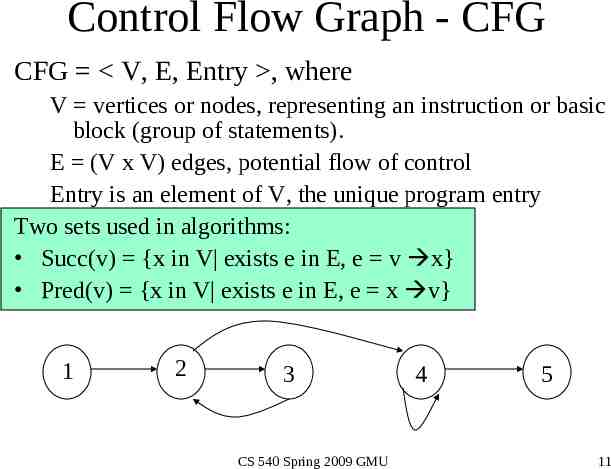
Control Flow Graph - CFG CFG V, E, Entry , where V vertices or nodes, representing an instruction or basic block (group of statements). E (V x V) edges, potential flow of control Entry is an element of V, the unique program entry Two sets used in algorithms: Succ(v) {x in V exists e in E, e v x} Pred(v) {x in V exists e in E, e x v} 1 2 3 CS 540 Spring 2009 GMU 4 5 11
Definitions point - any location between adjacent statements and before and after a basic block. A path in a CFG from point p1 to pn is a sequence of points such that j, 1 j n, either pi is the point immediately preceding a statement and pi 1 is the point immediately following that statement in the same block, or pi is the end of some block and pi 1 is the start of a successor block. CS 540 Spring 2009 GMU 12
CFG c a b d a*c i 1 points path f[i] a b c c*2 if c d g a*c g d*d i i 1 if i 10 CS 540 Spring 2009 GMU 13
Optimizations on CFG Must take control flow into account – – – – – Common Sub-expression Elimination Constant Propagation Dead Code Elimination Partial redundancy Elimination Applying one optimization may create opportunities for other optimizations. CS 540 Spring 2009 GMU 14
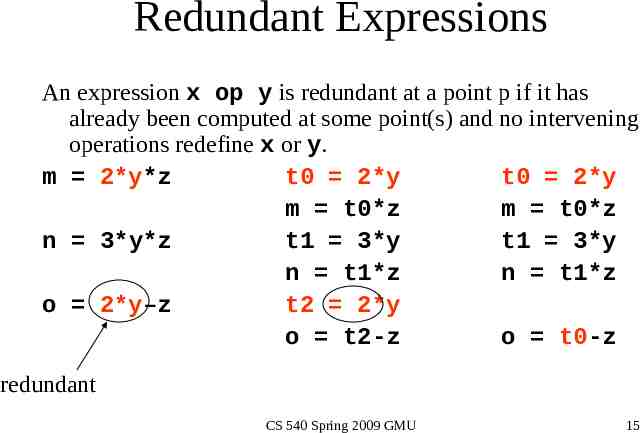
Redundant Expressions An expression x op y is redundant at a point p if it has already been computed at some point(s) and no intervening operations redefine x or y. m 2*y*z t0 2*y t0 2*y m t0*z m t0*z n 3*y*z t1 3*y t1 3*y n t1*z n t1*z o 2*y–z t2 2*y o t2-z o t0-z redundant CS 540 Spring 2009 GMU 15
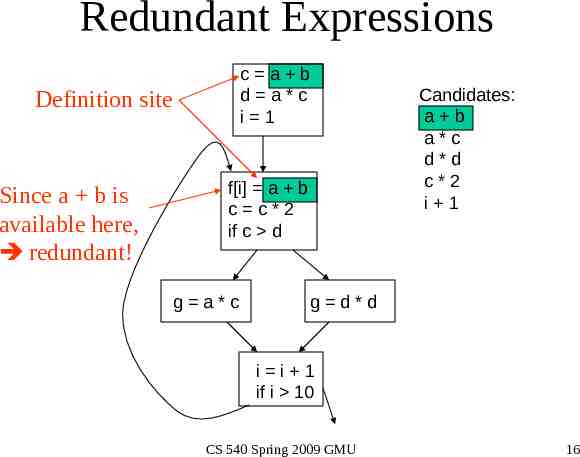
Redundant Expressions c a b d a*c i 1 Definition site Since a b is available here, redundant! f[i] a b c c*2 if c d g a*c Candidates: a b a*c d*d c*2 i 1 g d*d i i 1 if i 10 CS 540 Spring 2009 GMU 16
Redundant Expressions c a b d a*c i 1 Definition site Kill site Not available Not redundant f[i] a b c c*2 if c d g a*c Candidates: a b a*c d*d c*2 i 1 g d*d i i 1 if i 10 CS 540 Spring 2009 GMU 17
Redundant Expressions An expression e is defined at some point p in the CFG if its value is computed at p. (definition site) An expression e is killed at point p in the CFG if one or more of its operands is defined at p. (kill site) An expression is available at point p in a CFG if every path leading to p contains a prior definition of e and e is not killed between that definition and p. CS 540 Spring 2009 GMU 18
Removing Redundant Expressions t1 a b c t1 d a*c i 1 f[i] t1 c c*2 if c d g a*c Candidates: a b a*c d*d c*2 i 1 g d*d i i 1 if i 10 CS 540 Spring 2009 GMU 19
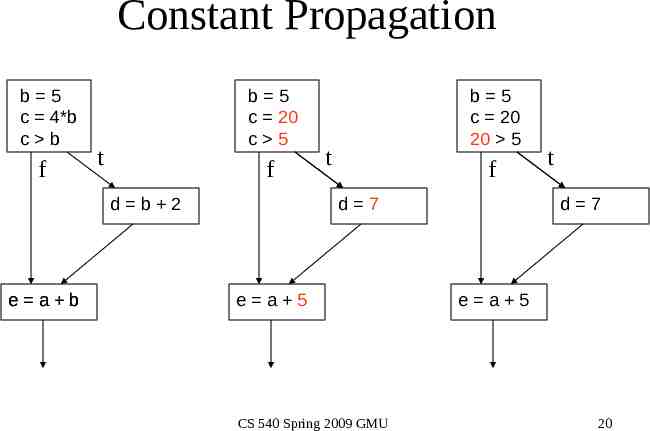
Constant Propagation b 5 c 4*b c b f b 5 c 20 c 5 t f d b 2 e a b b 5 c 20 20 5 t f d 7 e a 5 CS 540 Spring 2009 GMU t d 7 e a 5 20
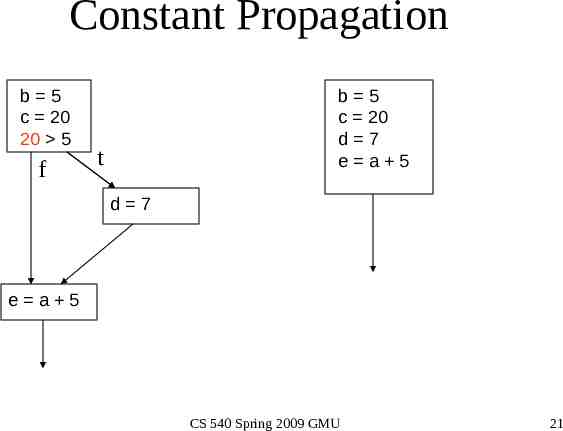
Constant Propagation b 5 c 20 20 5 f b 5 c 20 d 7 e a 5 t d 7 e a 5 CS 540 Spring 2009 GMU 21
Copy Propagation b a c 4*b c b b a c 4*a c a d b 2 d a 2 e a b e a a CS 540 Spring 2009 GMU 22
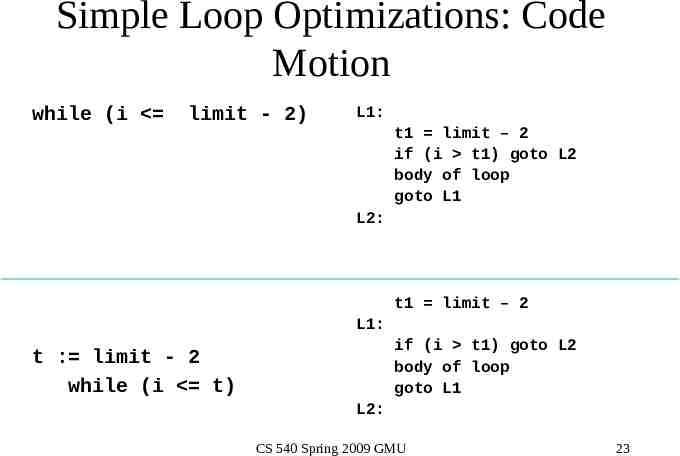
Simple Loop Optimizations: Code Motion while (i limit - 2) L1: t1 limit – 2 if (i t1) goto L2 body of loop goto L1 L2: t1 limit – 2 L1: if (i t1) goto L2 body of loop goto L1 t : limit - 2 while (i t) L2: CS 540 Spring 2009 GMU 23
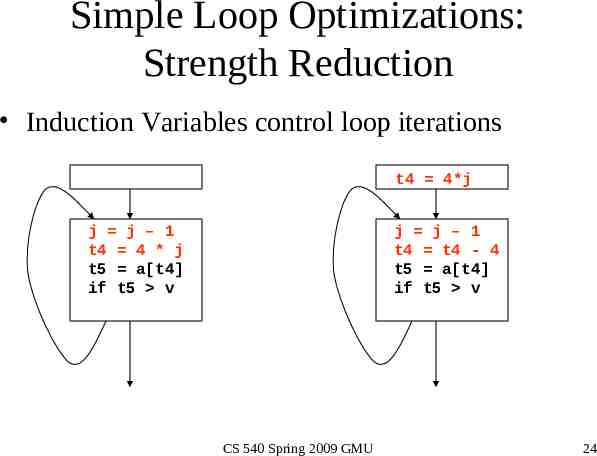
Simple Loop Optimizations: Strength Reduction Induction Variables control loop iterations t4 4*j j j – 1 t4 4 * j t5 a[t4] if t5 v j j – 1 t4 t4 - 4 t5 a[t4] if t5 v CS 540 Spring 2009 GMU 24
Simple Loop Optimizations Loop transformations are often used to expose other optimization opportunities: – – – – – Normalization Loop Interchange Loop Fusion Loop Reversal CS 540 Spring 2009 GMU 25
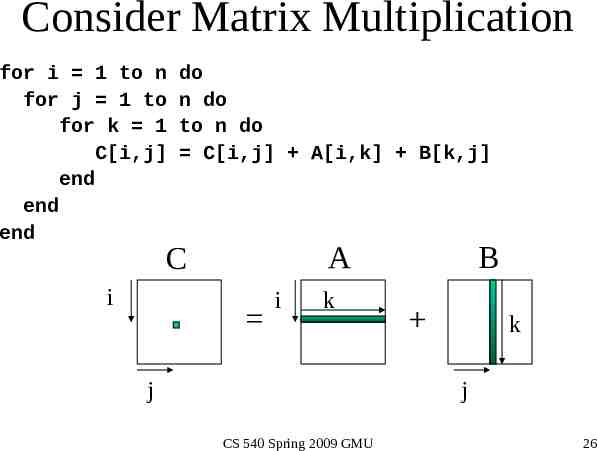
Consider Matrix Multiplication for i 1 to n for j 1 to for k 1 C[i,j] end end end do n do to n do C[i,j] A[i,k] B[k,j] A C i i k j B k j CS 540 Spring 2009 GMU 26
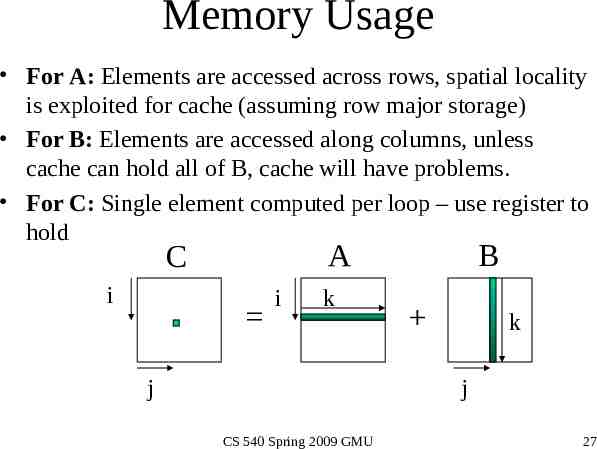
Memory Usage For A: Elements are accessed across rows, spatial locality is exploited for cache (assuming row major storage) For B: Elements are accessed along columns, unless cache can hold all of B, cache will have problems. For C: Single element computed per loop – use register to hold A C i i k j B k j CS 540 Spring 2009 GMU 27
Matrix Multiplication Version 2 for i 1 to n for k 1 to for j 1 C[i,j] end end end do loop interchange n do to n do C[i,j] A[i,k] B[k,j] A C i j i B k k CS 540 Spring 2009 GMU j 28
Memory Usage For A: Single element loaded for loop body For B: Elements are accessed along rows to exploit spatial locality. For C: Extra loading/storing, but across rows A C i j i B k k CS 540 Spring 2009 GMU j 29
Simple Loop Optimizations How to determine safety? – Does the new multiply give the same answer? – Can be reversed? for (I 1 to N) a[I] a[I 1] – can this loop be safely reversed? CS 540 Spring 2009 GMU 30
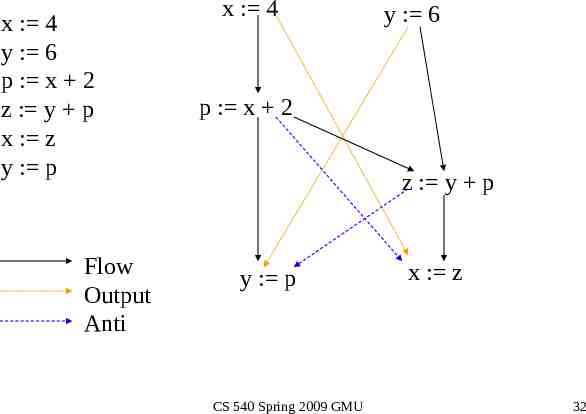
Data Dependencies Flow Dependencies - write/read x : 4; y : x 1 Output Dependencies - write/write x : 4; x : y 1; Antidependencies - read/write y : x 1; x : 4; CS 540 Spring 2009 GMU 31
x : 4 y : 6 p : x 2 z : y p x : z y : p Flow Output Anti x : 4 y : 6 p : x 2 z : y p y : p CS 540 Spring 2009 GMU x : z 32
Global Data Flow Analysis Collecting information about the way data is used in a program. Takes control flow into account HL control constructs – Simpler – syntax driven – Useful for data flow analysis of source code General control constructs – arbitrary branching Information needed for optimizations such as: constant propagation, common sub-expressions, partial redundancy elimination CS 540 Spring 2009 GMU 33
Dataflow Analysis: Iterative Techniques First, compute local (block level) information. Iterate until no changes while change do change false for each basic block apply equations updating IN and OUT if either IN or OUT changes, set change to true end CS 540 Spring 2009 GMU 34
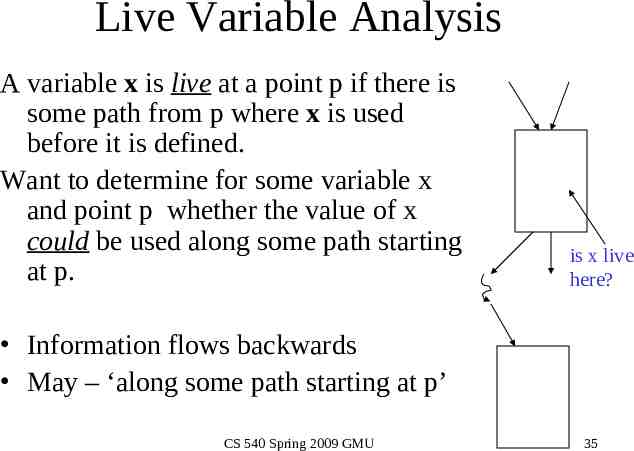
Live Variable Analysis A variable x is live at a point p if there is some path from p where x is used before it is defined. Want to determine for some variable x and point p whether the value of x could be used along some path starting at p. is x live here? Information flows backwards May – ‘along some path starting at p’ CS 540 Spring 2009 GMU 35
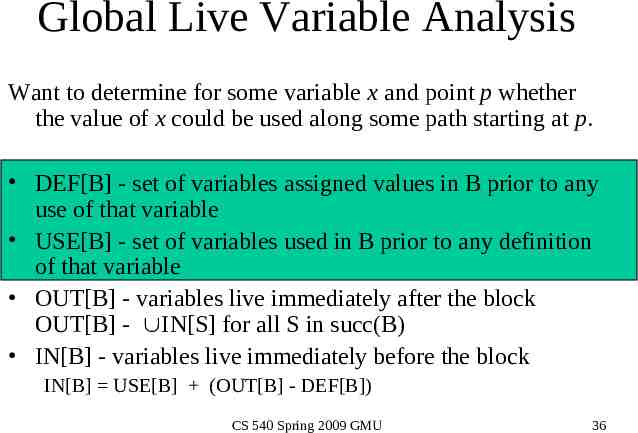
Global Live Variable Analysis Want to determine for some variable x and point p whether the value of x could be used along some path starting at p. DEF[B] - set of variables assigned values in B prior to any use of that variable USE[B] - set of variables used in B prior to any definition of that variable OUT[B] - variables live immediately after the block OUT[B] - IN[S] for all S in succ(B) IN[B] - variables live immediately before the block IN[B] USE[B] (OUT[B] - DEF[B]) CS 540 Spring 2009 GMU 36
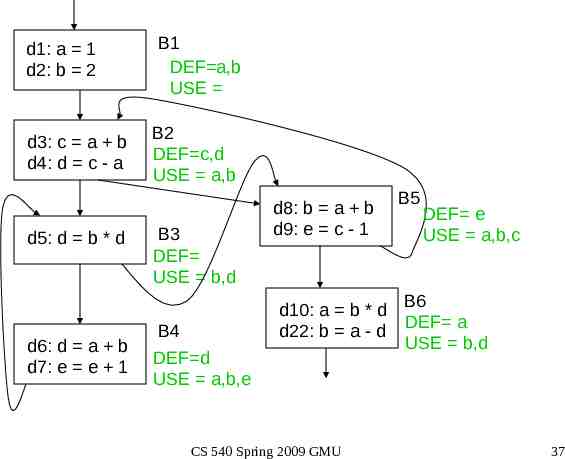
d1: a 1 d2: b 2 d3: c a b d4: d c - a d5: d b * d d6: d a b d7: e e 1 B1 DEF a,b USE B2 DEF c,d USE a,b B3 DEF USE b,d d8: b a b d9: e c - 1 d10: a b * d d22: b a - d B4 DEF d USE a,b,e CS 540 Spring 2009 GMU B5 DEF e USE a,b,c B6 DEF a USE b,d 37
Global Live Variable Analysis Want to determine for some variable x and point p whether the value of x could be used along some path starting at p. DEF[B] - set of variables assigned values in B prior to any use of that variable USE[B] - set of variables used in B prior to any definition of that variable OUT[B] - variables live immediately after the block OUT[B] - IN[S] for all S in succ(B) IN[B] - variables live immediately before the block IN[B] USE[B] (OUT[B] - DEF[B]) CS 540 Spring 2009 GMU 38
IN OUT IN OUT IN OUT B1 a,b a,b e a,b,e B2 a,b a,b,c,d a,b,e a,b,c,d ,e a,b,e B3 a,b,c,d e a,b,c,e a,b,c,d,e a,b,c,d,e a,b,c,d,e a,b,c,d,e a,b,c,d,e B4 a,b,c,e a,b,c,d,e a,b,c,e a,b,c,d,e a,b,c,e a,b,c,d,e B5 a,b,c,d a,b,d a,b,c,d a,b,d,e a,b,c,d a,b,d,e B6 b,d b,d b,d Block DEF OUT[B] IN[S] for all S in succ(B) IN[B] USE[B] (OUT[B] - DEF[B]) CS 540 Spring 2009 GMU USE B1 {a,b} {} B2 {c,d} {a,b} B3 {} {b,d} B4 {d} {a,b,e} B5 {e} {a,b,c} B6 {a} {b,d}39
{e} {a,b,e} {a,b,e} {a,b,c,d,e} {a,b,c,d,e} {a,b,c,d,e} {a,b,c,d} {a,b,c,e} {a,b,c,d,e} {a,b,d,e} CS 540 Spring 2009 GMU {b,d} {} 40
Dataflow Analysis Problem #2: Reachability A definition of a variable x is a statement that may assign a value to x. A definition may reach a program point p if there exists some path from the point immediately following the definition to p such that the assignment is not killed along that path. Concept: relationship between definitions and uses CS 540 Spring 2009 GMU 41
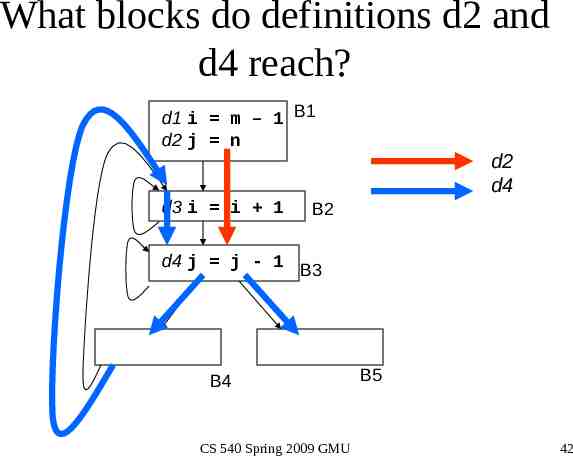
What blocks do definitions d2 and d4 reach? d1 i m – 1 B1 d2 j n d3 i i 1 d2 d4 B2 d4 j j - 1 B3 B4 CS 540 Spring 2009 GMU B5 42
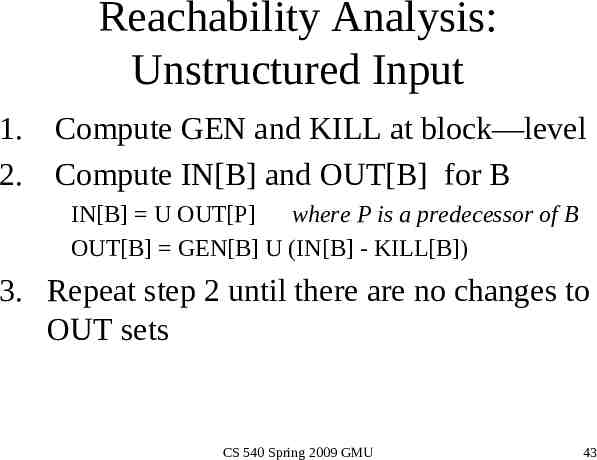
Reachability Analysis: Unstructured Input 1. 2. Compute GEN and KILL at block—level Compute IN[B] and OUT[B] for B IN[B] U OUT[P] where P is a predecessor of B OUT[B] GEN[B] U (IN[B] - KILL[B]) 3. Repeat step 2 until there are no changes to OUT sets CS 540 Spring 2009 GMU 43
Reachability Analysis: Step 1 For each block, compute local (block level) information GEN/KILL sets – GEN[B] set of definitions generated by B – KILL[B] set of definitions that can not reach the end of B This information does not take control flow between blocks into account. CS 540 Spring 2009 GMU 44
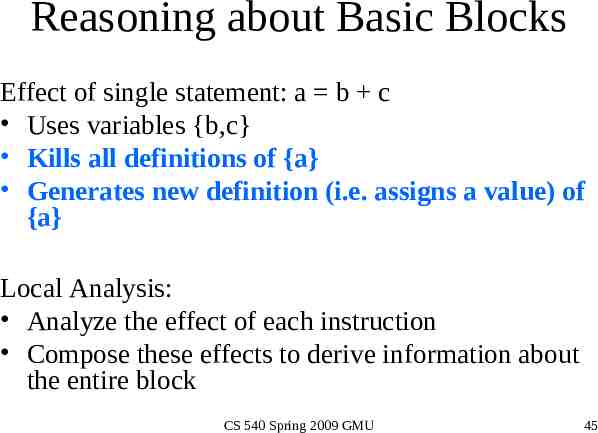
Reasoning about Basic Blocks Effect of single statement: a b c Uses variables {b,c} Kills all definitions of {a} Generates new definition (i.e. assigns a value) of {a} Local Analysis: Analyze the effect of each instruction Compose these effects to derive information about the entire block CS 540 Spring 2009 GMU 45
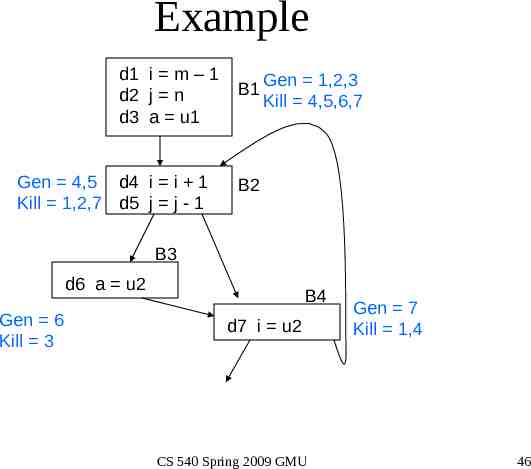
Example d1 i m – 1 d2 j n d3 a u1 Gen 4,5 d4 i i 1 Kill 1,2,7 d5 j j - 1 B1 Gen 1,2,3 Kill 4,5,6,7 B2 B3 d6 a u2 Gen 6 Kill 3 B4 d7 i u2 CS 540 Spring 2009 GMU Gen 7 Kill 1,4 46
Reachability Analysis: Step 2 Compute IN/OUT for each block in a forward direction. Start with IN[B] – IN[B] set of defns reaching the start of B (out[P]) for all predecessor blocks in the CFG – OUT[B] set of defns reaching the end of B GEN[B] (IN[B] – KILL[B]) Keep computing IN/OUT sets until a fixed point is reached. CS 540 Spring 2009 GMU 47
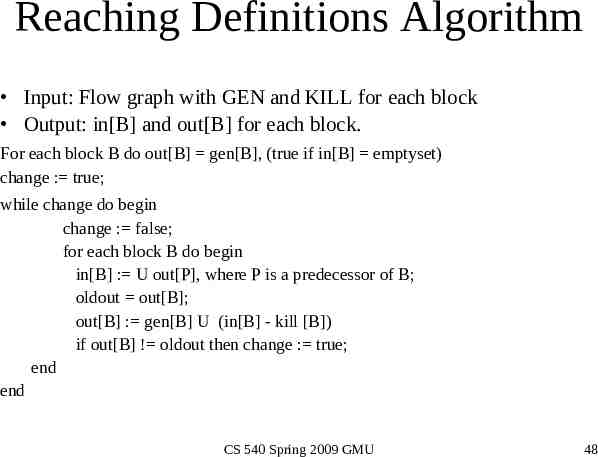
Reaching Definitions Algorithm Input: Flow graph with GEN and KILL for each block Output: in[B] and out[B] for each block. For each block B do out[B] gen[B], (true if in[B] emptyset) change : true; while change do begin change : false; for each block B do begin in[B] : U out[P], where P is a predecessor of B; oldout out[B]; out[B] : gen[B] U (in[B] - kill [B]) if out[B] ! oldout then change : true; end end CS 540 Spring 2009 GMU 48
Gen 1,2,3 Kill 4,5,6,7 d1 i m – 1 d2 j n d3 a u1 IN OUT B1 Gen 4,5 d4 i i 1 Kill 1,2,7 d5 j j - 1 B2 B3 d6 a u2 Gen 6 Kill 3 B1 1,2,3 B2 4,5 B3 6 B4 7 B4 d7 i u2 Gen 7 Kill 1,4 IN[B] (out[P]) for all predecessor blocks in the CFG OUT[B] GEN[B] (IN[B] – KILL[B]) CS 540 Spring 2009 GMU 49
IN OUT IN OUT B1 1,2,3 1,2,3 B2 4,5 OUT[1] OUT[4] 4,5 (1,2,3,7 1,2,3,7 – 1,2,7) 3,4,5 B3 6 OUT[2] 3,4,5 B4 7 OUT[2] OUT[3] 7 (3,4,5,6 – 1,4) 3,5,6,7 3,4,5,6 6 (3,4,5 – 3) 4,5,6 IN[B] (out[P]) for all predecessor blocks in the CFG OUT[B] GEN[B] (IN[B] – KILL[B]) CS 540 Spring 2009 GMU 50
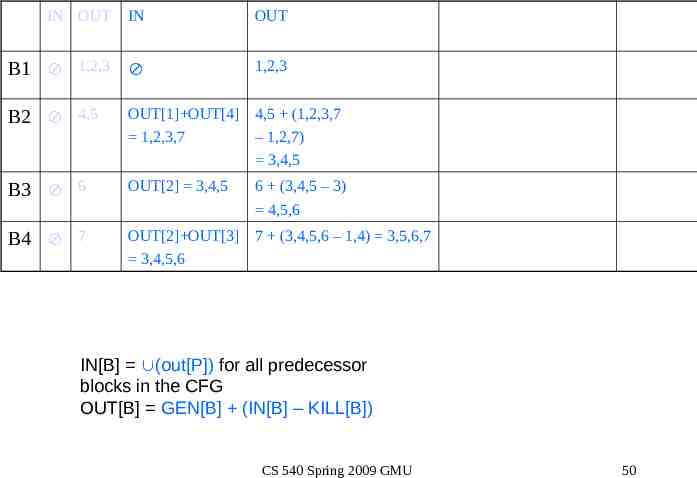
IN OUT IN OUT IN OUT B1 1,2,3 1,2,3 1,2,3 B2 4,5 1,2,3,7 3,4,5 OUT[1] OUT[4] 1,2,3,5,6,7 4,5 (1,2,3,5,6,7-1,2,7) 3,4,5,6 B3 6 3,4,5 4,5,6 OUT[2] 3,4,5,6 6 (3,4,5,6 – 3) 4,5,6 B4 7 3,4,5,6 3,5,6,7 OUT[2] OUT[3] 3,4,5,6 7 (3,4,5,6 – 1,4) 3,5,6,7 IN[B] (out[P]) for all predecessor blocks in the CFG OUT[B] GEN[B] (IN[B] – KILL[B]) CS 540 Spring 2009 GMU 51
Forward vs. Backward Forward flow vs. Backward flow Forward: Compute OUT for given IN,GEN,KILL – Information propagates from the predecessors of a vertex. – Examples: Reachability, available expressions, constant propagation Backward: Compute IN for given OUT,GEN,KILL – Information propagates from the successors of a vertex. – Example: Live variable Analysis CS 540 Spring 2009 GMU 52
Forward vs. Backward Equations Forward vs. backward – Forward: IN[B] - process OUT[P] for all P in predecessors(B) OUT[B] local U (IN[B] – local) – Backward: OUT[B] - process IN[S] for all S in successor(B) IN[B] local U (OUT[B] – local) CS 540 Spring 2009 GMU 53
May vs. Must May vs. Must Must – true on all paths Ex: constant propagation – variable must provably hold appropriate constant on all paths in order to do a substitution May – true on some path Ex: Live variable analysis – a variable is live if it could be used on some path; reachability – a definition reaches a point if it can reach it on some path CS 540 Spring 2009 GMU 54
May vs. Must Equations May vs. Must – May – IN[B] (out[P]) for all P in pred(B) – Must – IN[B] (out[P]) for all P in pred(B) CS 540 Spring 2009 GMU 55
Reachability – IN[B] (out[P]) for all P in pred(B) – OUT[B] GEN[B] (IN[B] – KILL[B]) Live Variable Analysis – OUT[B] (IN[S]) for all S in succ(B) – IN[B] USE[B] (OUT[B] - DEF[B]) Constant Propagation – IN[B] (out[P]) for all P in pred(B) – OUT[B] DEF CONST[B] (IN[B] – KILL CONST[B]) CS 540 Spring 2009 GMU 56
Discussion Why does this work? – Finite set – can be represented as bit vectors – Theory of lattices Is this guaranteed to terminate? – Sets only grow and since finite in size Can we find ways to reduce the number of iterations? CS 540 Spring 2009 GMU 57
Choosing visit order for Dataflow Analysis In forward flow analysis situations, if we visit the blocks in depth first order, we can reduce the number of iterations. Suppose definition d follows block path 3 5 19 35 16 23 45 4 10 17 where the block numbering corresponds to the preorder depth-first numbering. Then we can compute the reach of this definition in 3 iterations of our algorithm. 3 5 19 35 16 23 45 4 10 17 CS 540 Spring 2009 GMU 58






