Hierarchical Planning Group No. 3 Abhishek Mallik (113050019)



38 Slides566.00 KB
Hierarchical Planning Group No. 3 Abhishek Mallik (113050019) Avishek Dan (113050011) Subhasish Saha (113050048)
Overview Introduction Motivation Properties ABSTRIPS Observations Hierarchical Task Network (HTN) Application : Multi-agent Plan synergy Way Forward : Using ontology Conclusion References
Planning Sequence of actions worked out beforehand In order to accomplish a task
Example : One level planner Planning for ”Going to Goa this Cristmas” Switch on computer Start web browser Open Indian Railways website Select date Select class Select train . so on Practical problems are too complex to be solved at one level
How Complex ? A captain of a cricket team plans the order of 5 bowlers in 2 days of a test match(180 overs). Number of possibilities : 5180 2590 Much greater than 1087 (approx. number of particles in the universe)
Hierarchy in Planning Hierarchy of actions In terms of major action or minor action Lower level activities would detail more precise steps for accomplishing the higher level tasks. Ref : [1,2]
Example Planning for ”Going to Goa this Cristmas” Major Steps : Hotel Booking Ticket Booking Reaching Goa Staying and enjoying there Coming Back Minor Steps : Take a taxi to reach station / airport Have candle light dinner on beach Take photos
Motivation Reduces the size of search space Instead of having to try out a large number of possible plan ordering, plan hierarchies limit the ways in which an agent can select and order its primitive operators Ref : [4]
Example 180 overs : 15 spells (12 overs each) 5 bowlers : 3 categories (2 pacer/2 spinner/1 pacer&1 spinner) Top level possibilities : 315 Total possibilities 3*315 (much less than 5180)
Motivation contd. If entire plan has to be synthesized at the level of most detailed actions, it would be impossibly long. Natural to 'intelligent' agent Ref : [1]
General Property Postpone attempts to solve mere details, until major steps are in place. Higher level plan may run into difficulties at a lower level, causing the need to return to higher level again to produce appropriately ordered sequence. Ref : [1,2]
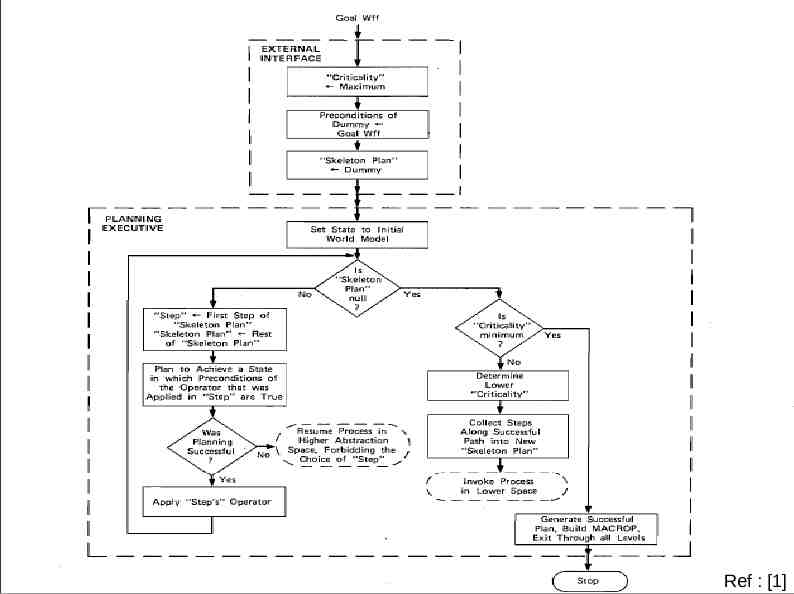
Planner Identify a hierarchy of conditions Construct a plan in levels, postponing details to the next level Patch higher levels as details become visible Demonstrated using ABSTRIPS Ref : [1,2]
ABSTRIPS Abstraction-Based STRIPS Modified version of STRIPS that incorporates hierarchical planning Ref : [1,2]
Hierarchy in ABSTRIPS Hierarchy of conditions reflect the intrinsic difficulty of achieving various conditions. Indicated by criticality value. Ref : [2]
Criticality A operation having minimum criticality can be trivially achievable, i.e., the operations having very less or no precondition. Example : Opening makemytrip.com Similarly operation having many preconditions to satisfy will have higher criticality.
Patching in ABSTRIPS Each level starts with the goal stack that includes the plan obtained in the higher levels. The last item in the goal stack being the main goal. Ref : [2]
Ref : [1]
Example Actions required for “Travelling to Goa”: Opening makemytrip.com (1) Finding flight (2) Buy Ticket (3) Get taxi(2) Reach airport(3) Pay-driver(1) Check in(1) Boarding plane(2) Reach Goa(3)
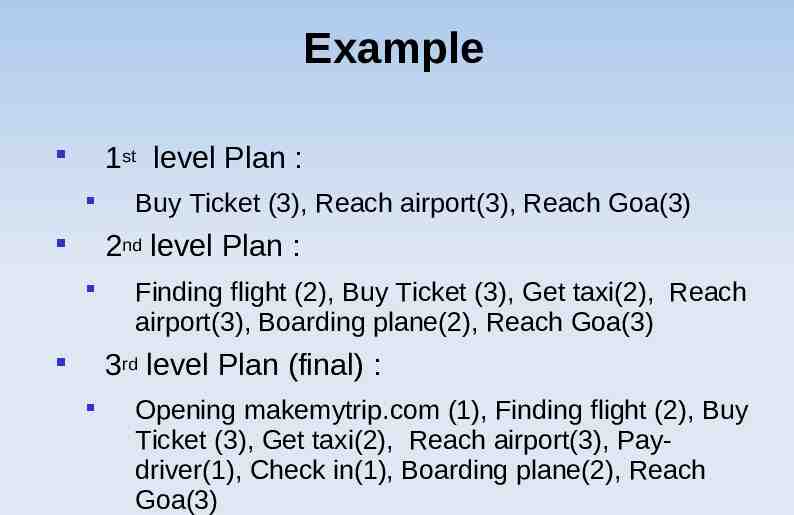
Example 1st level Plan : Buy Ticket (3), Reach airport(3), Reach Goa(3) 2nd level Plan : Finding flight (2), Buy Ticket (3), Get taxi(2), Reach airport(3), Boarding plane(2), Reach Goa(3) 3rd level Plan (final) : Opening makemytrip.com (1), Finding flight (2), Buy Ticket (3), Get taxi(2), Reach airport(3), Paydriver(1), Check in(1), Boarding plane(2), Reach Goa(3)
Observation As the number of operator increases, performance of hierarchical planning comes out to be much better than one level planning Ref : [1]
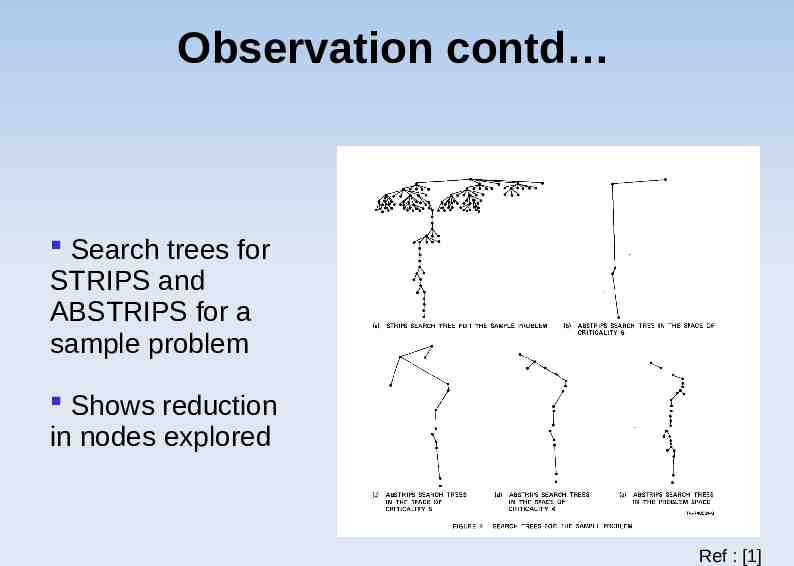
Observation contd Search trees for STRIPS and ABSTRIPS for a sample problem Shows reduction in nodes explored Ref : [1]
Hierarchical Task Network (HTN) STRIPS style planning drawbacks: Compound Goal Ex. Round trip : Mumbai-Goa-Mumbai Intermediate Constraints Ex. Before(reach station, boarding train) Most practical AI planners use HTN NOAH(1990), NONLIN(1990), SIPE(1988), DEVISER(1983), SOAP(2001), SOAP-2(2003) Ref : [3,4]
Task Network Collection of task and constraints on those tasks ((n1, α1) , , ((nm, αm) ,ϕ), where α1 is task labeled with n1 ,and boolean formula expressing constraints. Truth constraint : (n, p, n’) means p will be true immediately after n and immediately before n’. Temporal ordering constraint : n n’ means task n precedes n’. Variable binding constraint : ᴧ,ᴠ, , etc. Ref : [3]
Hierarchical Task Network Hierarchy abstraction achieved through methods. A method is a pair (α, d) , where α is the non-primitive task, and d is the task network to achieve the task α Ref : [3]
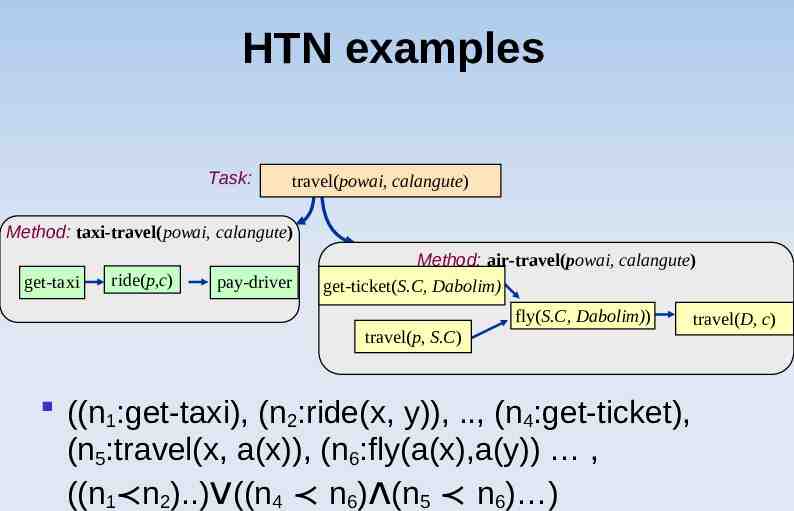
HTN examples Task: travel(powai, calangute) Method: taxi-travel(powai, calangute) get-taxi ride(p,c) pay-driver Method: air-travel(powai, calangute) get-ticket(S.C, Dabolim) fly(S.C, Dabolim)) travel(p, S.C) ((n1:get-taxi), (n2:ride(x, y)), ., (n4:get-ticket), (n5:travel(x, a(x)), (n6:fly(a(x),a(y)) , ((n1 n2).)ᴠ((n4 n6)ᴧ(n5 n6) ) travel(D, c)
Application: Synergy between Agents Discovering the synergy between the plans of multiple agents In order to achieve the goal in reduced effort Ref : [4]
Summary Information Summary information encodes the hierarchy in planning. We define a hierarchical plan step p as a tuple (pre, in, post, type, order, subplan, cost, duration) pre, in and post are conditions Type has one of the three values: primitive, or, and. Order is a set of temporal ordering constraints Primitive plans has no subplan But initially these explicit condition information for nonprimitive actions are not known. This information is propagated from the primitive plan steps to the abstract plan step through a summary info. Ref : [4]
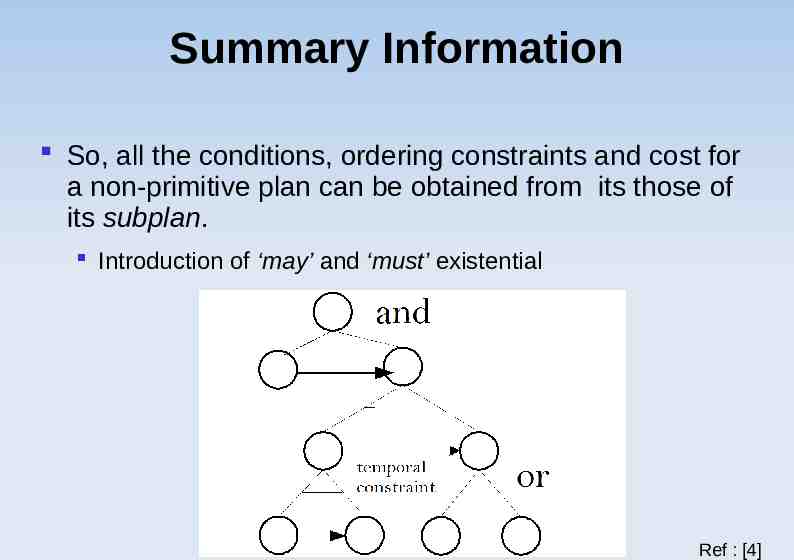
Summary Information So, all the conditions, ordering constraints and cost for a non-primitive plan can be obtained from its those of its subplan. Introduction of ‘may’ and ‘must’ existential Ref : [4]
May and Must existential ‘May’ and ‘Must’ are existential introduced due to hierarchical non-primitive representation of task. May : ‘OR’ ing of tasks to non-primitive task introduces ‘may’ Must : ‘AND’ ing of tasks to non-primitive task introduces ‘must’ These existential is different from the concept of criticality
Plan merging If ‘must’ post-condition of one plan includes ‘must’ post-condition of other plan, then they can be merged. Since ‘may’ is at higher level of abstraction, its hierarchy has to be decomposed to the point of ‘must’ . Inter-agent temporal constraints has to be established. Ref : [4]
Top-down synergy Plans at higher level of hierarchy achieves more effects than at a lower level. A part of the plan can be pruned if its postconditions do not overlap with any other plan’s post-condition. Ref : [4]
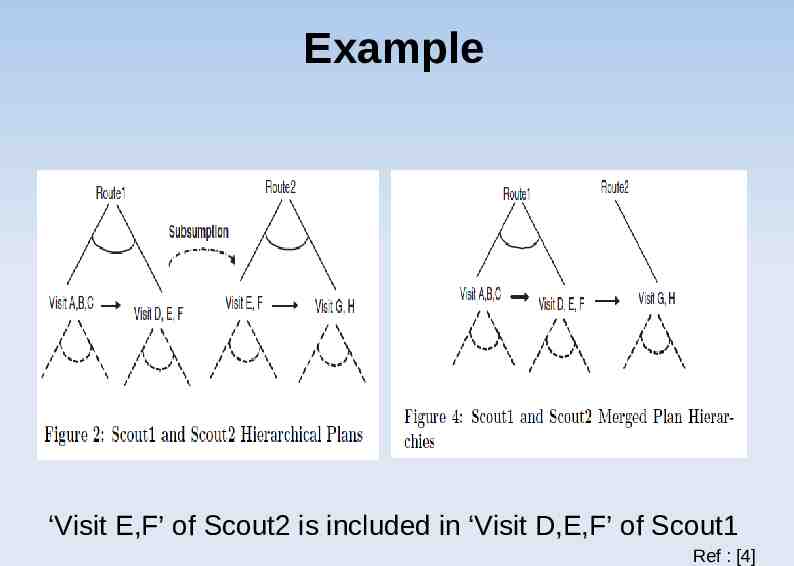
Example ‘Visit E,F’ of Scout2 is included in ‘Visit D,E,F’ of Scout1 Ref : [4]
Ontology and Hierarchical Planning Hierarchical planning in real world requires modeling an efficient, semantic, and flexible knowledge representation for both planning and domain knowledge. Ontology helps to conceptualize the hierarchy of operators and domain. Ref : [5]
Example To perform operation ‘Buy ticket’ agent has to understand concept of ‘Buy’ and ‘ticket’ Buy is an action, between seller and customer, involves finding a seller, customer should have money to buy etc. Ticket is an object, which has some price, has particular owner, has some validity etc. This conceptualizations are extremely important for planning in that domain. Ref : [5]
Conclusion For complex problems hierarchical planning is much more efficient than single level planning. Improves performance as number of operator in the problem increases. HTN planning gives more expressivity Merging opens door to accomplish a complete plan from incomplete individual plans Integration with ontology opens door for automatic planning Reduces man machine gap.
References 1) E.D. Sacerdoti, Planning in a hierarchy of abstraction spaces, in: Proc. of the 3rd International Joint conference on Artificial Intelligence, 1973 2) Nils J. Nilsson: Principles of Artificial Intelligence, Springer 1982. 3) K. Erol, J. Hendler, and D. S. Nau. HTN planning: Complexity and expressivity. in: National Conference on Artificial Intelligence (AAAI), 1994 4) Jeffrey S. Cox and Edmund H. Durfee, ‘Discovering and Exploiting Synergy Between Hierarchical Planning Agents’, in: Second International Joint Conference On Autonomous Agents and Multiagent Systems, 2003 5) Choi H J Kang D, ‘Hierarchical planning through operator and world abstraction using ontology for home service robots’ ,in: Advanced Communication Technology, 2009. ICACT 2009. 11th International Conference on, 2009
QUESTI ONS
THANK YOU