Fault-tolerant Control System Design and Analysis Jin Jiang






















24 Slides844.50 KB
Fault-tolerant Control System Design and Analysis Jin Jiang Department of Electrical and Computer Engineering The University of Western Ontario London, Ontario N6A 5B9 Canada 04/26/23 1
Outline of the presentation Overview of two approaches to fault-tolerant control system design and analysis Redundancy in fault-tolerant control systems Trade-offs among redundancy, performance and integrity An example of passive fault-tolerant control design An example of active fault-tolerant control design Some open problems 2
Fault-tolerant control: An overview Passive fault-tolerant control systems Active fault-tolerant control systems Robust fixed structure controller Faults have been considered at the controller design stage Explicit fault detection/diagnosis schemes Real-time decision-making and controller reconfiguration The key to any fault-tolerant control system Redundancy 3
Passive fault-tolerant control systems faults - Controlle r L Actuator System Outputs Sensor faults 4
Active fault-tolerant control systems 5
Features and limitations Passive fault-tolerant control systems Simple to implement Difficult to account for large number of fault scenarios Unable to deal with unforeseen faults Active fault-tolerant control systems Potentially be able to deal with a large number of fault scenarios Can deal with certain number of unforeseen faults More complex to implement Real challenge is real-time decision-making 6
Redundancies Actuator redundancies Sensor redundancies Multiple physical actuators They usually act on the system at different locations Multiple physical sensors They usually measure the same physical quality Analytical redundancies Rely on mathematical models (FDI) 7
Actuator redundancies 8
Actuator Redundancies 9
Definitions of actuator redundancies 10
Sensor redundancies S12 z A1 u A2 2 A3 u System Dynamics y um Am 21 z S22 y p z1q z S 21 S 2q2 12 1 2 . 3 S 1q1 . u1 . 1 22 z 2q2 S p1 z S p2 z Spqp Sensor Outputs y 11 . System Outputs . System Inputs z p1 p2 . . Actuator Inputs S 11 z pqp 11
Outputs System . . Inputs Analytical Redundancies Sensors Redundant system output Intermediate system variables Analytical model 12
Performance trade-offs Three main factors to consider in any fault-tolerant control system design: System Integrity (safety requirements) Performance (design specifications) Redundancy (physical and financial constraints) Problem: How to design a control system, under a given degree of redundancy such that the integrity of the system is guaranteed and the performance is satisfactory. Issue 1: System integrity should always be maintained Issue 2: Faults should result in reduction of the degree of redundancy first Issue 3: One should consider performance degradation with available redundancies. 13
Example of passive fault-tolerant control system 14
Description of system 15
Control system performance 16
Control system performance 17
Example of active fault-tolerant control system 18
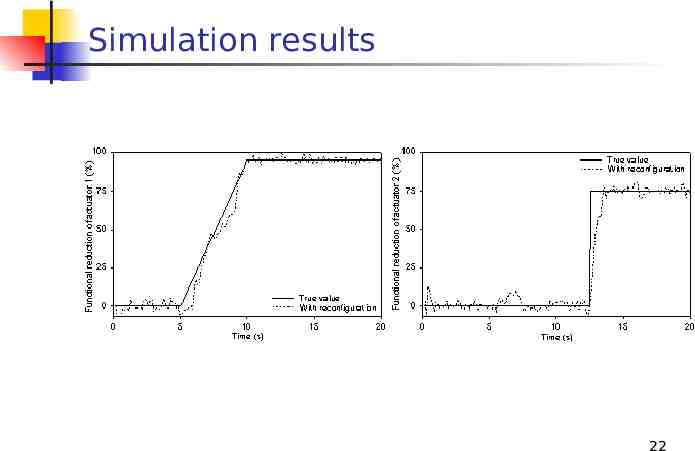
Simulation results 19
Simulation results 20
Simulation results 21
Simulation results 22
Some open problems Reliability analysis of fault-tolerant control systems Stability analysis of fault-tolerant control systems Graceful performance degradation Integration of passive and active approaches Industrial applications of fault-tolerant control system technologies 23
Thank You ! 24