By Group: Ghassan Abdo Rayyashi Anas to’meh Supervised by Dr.
29 Slides1.56 MB
By Group: Ghassan Abdo Rayyashi Anas to’meh Supervised by Dr. Lo’ai Tawalbeh
Outline Real-Time System Task categories Why we need scheduling Real time scheduling taxonomies Scheduling Periodic Tasks Real-Time Scheduling Algorithms Static scheduling algorithms Dynamic scheduling algorithms Hybrid algorithm referances
Real-Time System Real-time systems have been defined as: “those systems in which the correctness of the system depends not only on the logical result of the computation, but also on the time at which the results are produced“ Correct function at correct time Usually embedded Deadlines Hard real-time systems Soft real-time systems
Real-Time System continue Soft RTS: meet timing constraints most of the time, it is not necessary that every time constraint be met. Some deadline miss is tolerated. Hard RTS: meet all time constraints exactly, Every resource management system must work in the correct order to meet time constraints. No deadline miss is allowed.
Tasks Categories Invocation Periodic (time-triggered) Aperiodic (event-triggered) Creation Static Dynamic Multi-Tasking System Preemptive: higher-priority process taking control of the processor from a lower-priority Non-Preemptive : Each task can control the CPU for as long as it needs it.
Why we need scheduling ?! each computation (task) we want to execute needs resources resources: processor, memory segments, communication, I/O devices etc.) the computation must be executed in particular order (relative to each other and/or relative to time) the possible ordering is either completely or statistically a priori known (described) scheduling: assignment of processor to computations; allocation: assignment of other resources to computations;
Real-time Scheduling Taxonomy Job (Jij): Unit of work, scheduled and executed by system. Jobs repeated at regular or semi-regular intervals modeled as periodic Task (Ti): Set of related jobs. Jobs scheduled and allocated resources based on a set of scheduling algorithms and access control protocols. Scheduler: Module implementing scheduling algorithms Schedule: assignment of all jobs to available processors, produced by scheduler. Valid schedule: All jobs meet their deadline Clock-driven scheduling vs Event(priority)-driven scheduling Fixed Priority vs Dynamic Priority assignment
Scheduling Periodic Tasks In hard real-time systems, set of tasks are known apriori Task Ti is a series of periodic Jobs Jij. Each task has the following parameters ti - period, minimum interrelease interval between jobs in Task Ti. ci - maximum execution time for jobs in task T i. rij - release time of the jth Job in Task i (Jij in Ti). i - phase of Task Ti, equal to ri1. ui - utilization of Task Ti ci / ti In addition the following parameters apply to a set of tasks H - Hyperperiod Least Common Multiple of pi for all i: H lcm(pi), for all i. U - Total utilization Sum over all ui. Schedulable utilization of an algorithm Us If U Us the set of tasks can be guaranteed to be scheduled
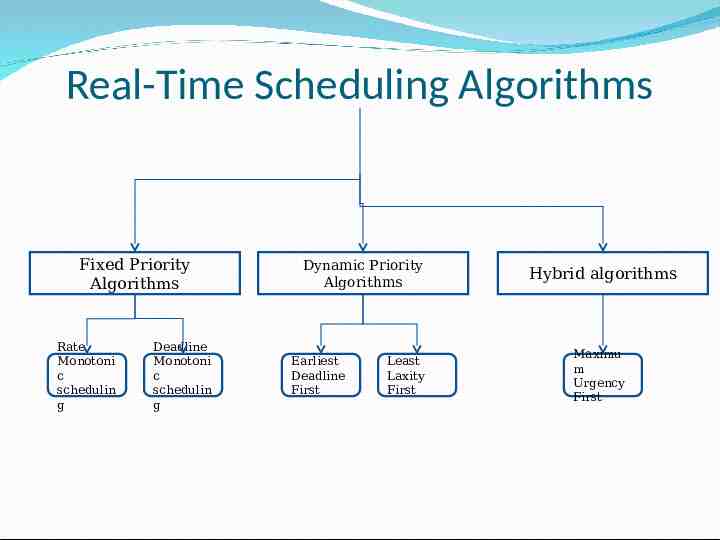
Real-Time Scheduling Algorithms Fixed Priority Algorithms Rate Monotoni c schedulin g Deadline Monotoni c schedulin g Dynamic Priority Algorithms Earliest Deadline First Least Laxity First Hybrid algorithms Maximu m Urgency First
Scheduling Algorithm Static vs. Dynamic Static Scheduling: All scheduling decisions at compile time. Temporal task structure fixed. Precedence and mutual exclusion satisfied by the schedule (implicit synchronization). One solution is sufficient. Any solution is a sufficient schedulability test. Benefits Simplicity
Scheduling Algorithm Static vs. Dynamic Dynamic Scheduling: All scheduling decisions at run time. Based upon set of ready tasks. Mutual exclusion and synchronization enforced by explicit synchronization constructs. Benefits Flexibility. Only actually used resources are claimed. Disadvantages Guarantees difficult to support Computational resources required for scheduling
Scheduling Algorithm Preemptive vs. Nonpreemptive Preemptive Scheduling: Event driven. Each event causes interruption of running tasks. Choice of running tasks reconsidered after each interruption. Benefits: Can minimize response time to events. Disadvantages: Requires considerable computational resources for scheduling
Scheduling Algorithm Preemptive vs. Nonpreemptive Nonpreemptive Scheduling: Tasks remain active till completion Scheduling decisions only made after task completion. Benefits: Reasonable when task execution times task switching times. Less computational resources needed for scheduling Disadvantages: Can leads to starvation (not met the deadline) especially for those real time tasks ( or high priority tasks).
Rate Monotonic scheduling Priority assignment based on rates of tasks Higher rate task assigned higher priority Schedulable utilization 0.693 (Liu and Leyland) Where Ci is the computation time, and Ti is the release period If U 0.693, schedulability is guaranteed Tasks may be schedulable even if U 0.693
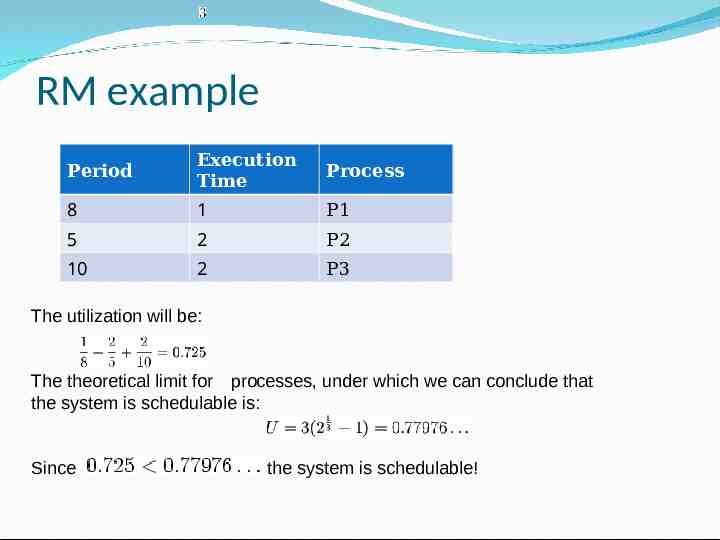
RM example Period Execution Time Process 8 1 P1 5 10 2 2 P2 P3 The utilization will be: The theoretical limit for processes, under which we can conclude that the system is schedulable is: Since the system is schedulable!
Deadline Monotonic scheduling Priority assignment based on relative deadlines of tasks Shorter the relative deadline, higher the priority
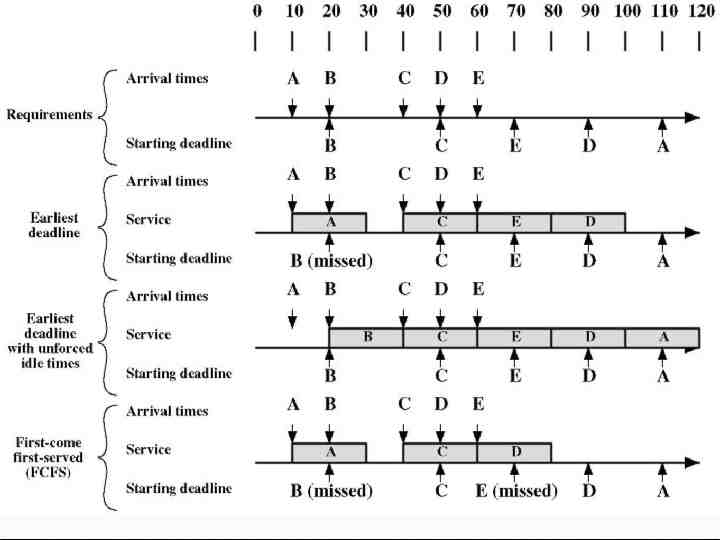
Earliest Deadline First (EDF) Dynamic Priority Scheduling Priorities are assigned according to deadlines: Earlier deadline, higher priority Later deadline, lower priority The first and the most effectively widely used dynamic priority-driven scheduling algorithm. Effective for both preemptive and non-preemptive scheduling.
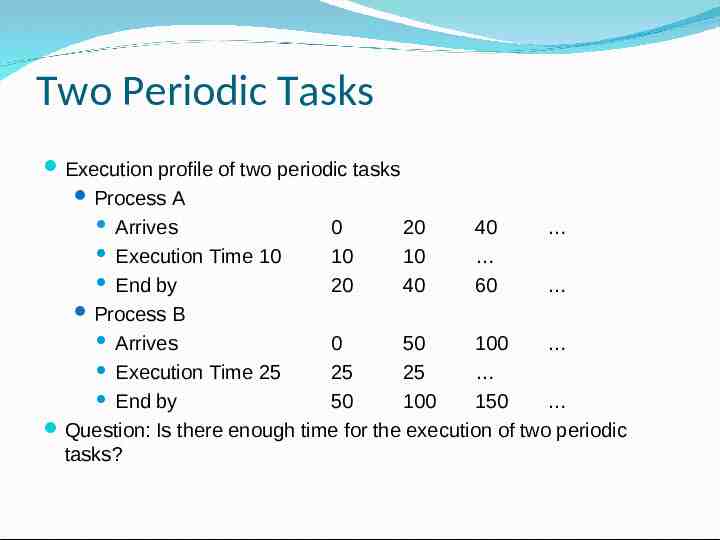
Two Periodic Tasks Execution profile of two periodic tasks Process A Arrives 0 20 40 Execution Time 10 10 10 End by 20 40 60 Process B Arrives 0 50 100 Execution Time 25 25 25 End by 50 100 150 Question: Is there enough time for the execution of two periodic tasks?
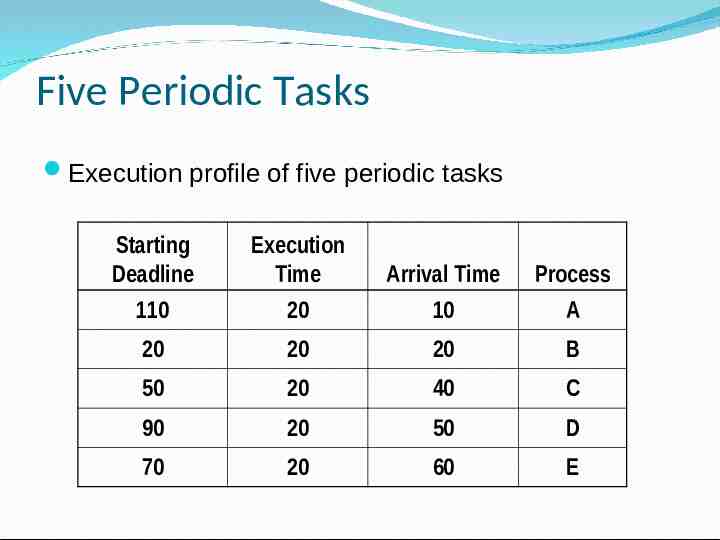
Five Periodic Tasks Execution profile of five periodic tasks Starting Deadline Execution Time Arrival Time Process 110 20 10 A 20 20 20 B 50 20 40 C 90 20 50 D 70 20 60 E
Least Laxity First (LLF) Dynamic preemptive scheduling with dynamic priorities Laxity : The difference between the time until a tasks completion deadline and its remaining processing time requirement. a laxity is assigned to each task in the system and minimum laxity tasks are executed first. Larger overhead than EDF due to higher number of context switches caused by laxity changes at run time Less studies than EDF due to this reason
Least Laxity First Cont LLF considers the execution time of a task, which EDF does not. LLF assigns higher priority to a task with the least laxity. A task with zero laxity must be scheduled right away and executed without preemption or it will fail to meet its deadline. The negative laxity indicates that the task will miss the deadline, no matter when it is picked up for execution.
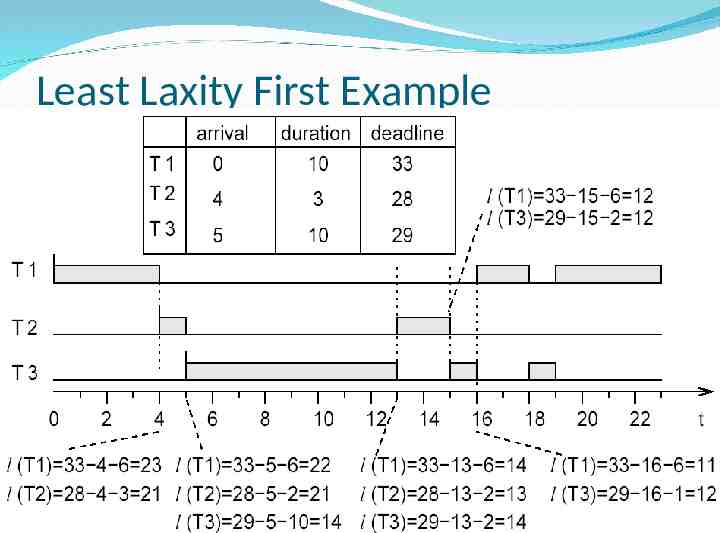
Least Laxity First Example
Maximum Urgency First Algorithm This algorithm is a combination of fixed and dynamic priority scheduling, also called mixed priority scheduling. With this algorithm, each task is given an urgency which is defined as a combination of two fixed priorities (criticality and user priority) and a dynamic priority that is inversely proportional to the laxity. The MUF algorithm assigns priorities in two phases Phase One concerns the assignment of static priorities to tasks Phase Two deals with the run-time behavior of the MUF scheduler
Maximum Urgency First Algorithm phase 1 The first phase consists of these steps : 1) It sorts the tasks from the shortest period to the longest period. Then it defines the critical set as the first N tasks such that the total CPU load factor does not exceed 100%. These tasks are guaranteed not to fail even during a transient overload. 2) All tasks in the critical set are assigned high criticality. The remaining tasks are considered to have low criticality. 3) Every task in the system is assigned an optional unique user priority
Maximum Urgency First Algorithm phase 2 In the second phase, the MUF scheduler follows an algorithm to select a task for execution. This algorithm is executed whenever a new task is arrived to the ready queue. The algorithm is as follows: 1) If there is only one highly critical task, pick it up and execute it. 2) If there are more than one highly critical task, select the one with the highest dynamic priority. Here, the task with the least laxity is considered to be the one with the highest priority. 3) If there is more than one task with the same laxity, select the one with the highest user priority.
Questions ?
Referances http://en.wikipedia.org/wiki/RTOS#Schedulin g http://en.wikipedia.org/wiki/Rate-monotonic s cheduling http://www.netrino.com/Publications/Glossar y/RMA.php