Biomimicry, Mathematics, and Physics for Control and
19 Slides2.69 MB
Biomimicry, Mathematics, and Physics for Control and Automation: Conflict or Harmony? Kevin M. Passino Dept. Electrical Engineering The Ohio State University
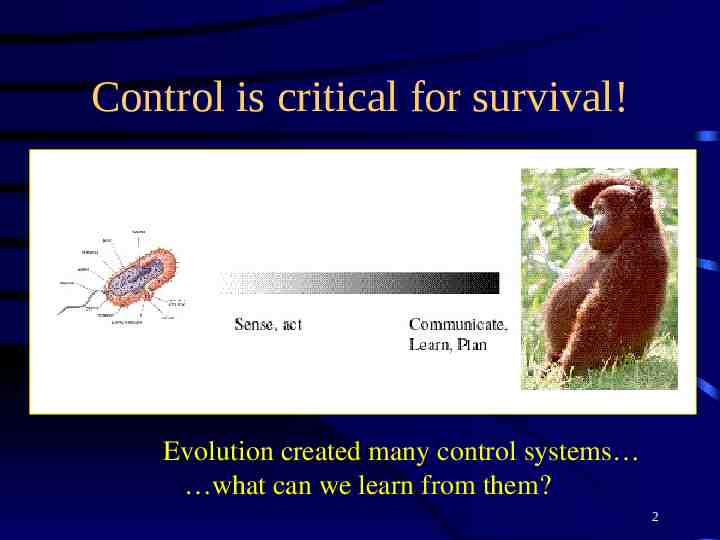
Control is critical for survival! Evolution created many control systems what can we learn from them? 2
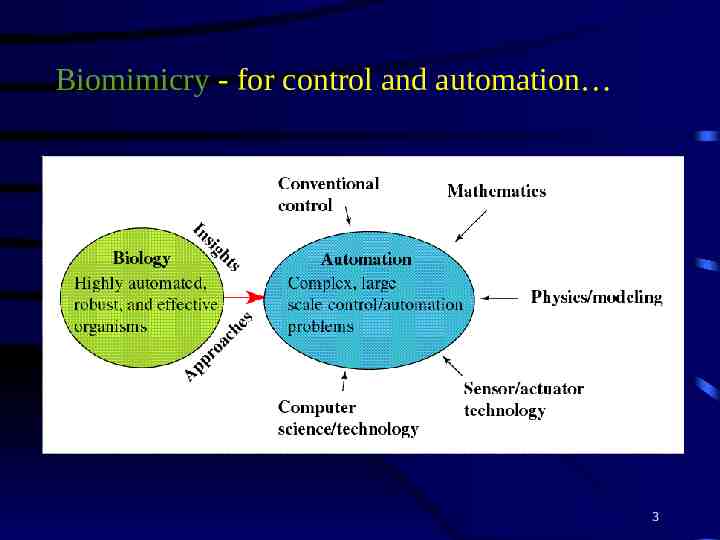
Biomimicry - for control and automation 3
Biomimicry vs. Math/Physics? Intelligent control emulation of biological control processes for solving automation problems Examples: – Neural networks (e.g., balancing, walking, learning) – Fuzzy systems (e.g., automated driving) Conventional control develop mathematical models, synthesize controllers, nonlinear analysis. Relations between these? Advantages? Disadvantages? 4
How do we compare? Theoretical comparisons? Stability, robustness, convergence? Simulation based studies? Applications, but which ones? Practical real-world ones or academic ones? Is there a “best” approach for all applications? Could it be that each has its own niche? Can we have a scientific discussion on this topic? 5
A framework for discussion Scientific, pragmatic-engineering, include theory/simulation/experimental views (even if outside your talents) No “pet-approaches” No hype and marketing Problems with these issues on all sides We use science, heuristics, and technology (computing, sensing, etc.) 6
Weak Foundations are the Essence and Fun Part of the Problem! Conventional Control – Modeling principle: – No model is perfect – Everything rests on model accuracy (including when we use uncertainty models in robust control) Intelligent Control – Evolutionary principle: – Organisms not designed to fly from Ohio to Valencia! – Why mimic them when their “environment” is different? 7
Uncertainty Principle: Coping with Uncertainty is the Essence of the Problem Many types of uncertainty Math/physics: Improve models (representing uncertainty), generalize synthesis methods Biomimicry: “Can we learn something from the most robust autonomous systems?” Math/physics applies to biomimicry-based methods, and can learn from it. Harmony! 8
Comparative Analysis is Difficult! Issues: Robustness, experimentation, cost (time, materials), complexity (e.g., memory, throughput), mathematical analysis, simulation analysis, manufacturability, understandability, ease of use, expandability Which metric? Fairness? Good comparative analysis is rare! 9
Fuzzy/Neural Vs. Conventional Control Fuzzy: Heuristic nonlinear controller synthesis. Avoid need for models? Are models used? Problems: Ignore physics/useful model information, models as a comparative tool, indiscriminate application of the approach, where is success? Similar in philosophy to PID control in industry! Good:Acknowledgement of role of heuristics that are used for almost all implementations (e.g., 9/10 exceptions/rules, 1/10 regulator) 10
Neural Control / Adaptive Fuzzy Control Optimization-based tuning of nonlinear mappings, emulation of adaptation heuristics (“on-line function approximation”) Stable adaptive fuzzy/neural control Extensions to function rather than parameter learning/adaptation (cope with more uncertainty) Heavy dependence on conventional adaptive control theory/analysis methods 11
Contributions to Applications? Ease of implementation (but difficult to quantify: sensitivity issues need study) Ease to incorporate intuitions about how to achieve good adaptive control Applicability to wider class of plants Problems: Complexity, tendency to be sloppy in some cases 12
Intelligent Control: Biomimicry for Control and Automation Neural networks for instinctual control Rule-based control Planning systems Attentional systems Learning systems/control Evolutionary methods Foraging (distributed optimization for decision-making) Fighting and competition (game theory) Swarms, collective intelligence, etc. This is an outline of my up-coming book 13
Scope is very broad Many problems not considered in conventional control (e.g., enterprise control, multiple vehicles) Showing how to bring new application areas to area of control Showing relations to methods in other areas of engineering, computer science, and biology/psychology Showing need for general design methodology and the value of many standard concepts from control systems research (e.g., robustness) 14
Challenges, Opportunities Challenge: Develop models (hybrid, multiple levels of abstraction, etc.) Significant uncertainties! Clear role for conventional control and biomimicrybased methods! An “evolution” from biomimicry to conventional is likely! Needs? Sound methodology, modeling, simulation, mathematical analysis, and experimentation. 15
Theoretical Foundations Optimization – – – – – – – Planning Attention Learning Evolution Foraging Fighting Swarms, etc. Stability Analysis – Neural/fuzzy – Planning (MPC) – Attention (resource allocation) – Learning (adaptive control) – Foraging, swarms, cooperative control Conventional nonlinear stability/robustness analysis is very useful! 16
Does biomimcry offer anything? What does the biomimicry viewpoint offer to the solution of complex control/automation problems? A cohesive framework for relating all the approaches A way to introduce new ideas and functionalities A way to explain complex dynamical systems and concepts Connections to underlying science (biology, physics). 17
What can nature teach us? Evolution designed robust organisms and this robustness is achieved via decisionmaking and control. The most successful control systems on earth are biological ones. What can we learn from them? What can biological science learn from the control-theoretic viewpoint? 18
Final remarks Need comparative analysis Need to avoid “pet” approaches Need to tone down the hype (conventional and intelligent). Need scientific discussions that include all dimensions (e.g., math and experimental) Need to recognize difficulty in obtaining “universal truths” and that a careful search for the truth is fun! 19