525311: Automatic Control Systems School of Mechanical Engineering 1

36 Slides1.54 MB
525311: Automatic Control Systems School of Mechanical Engineering 1
Prescribed text :Norman S.Nise, Control Systems Engineering: Fifth Edition, John Wiley & Sons, 2007 Recommended reading : รศ.นท.ดร.สราวุ ฒ ิ สุจต ิ จร, การควบคุมอัตโนมัติ , ซีเอ็ด พ.ศ.2546 Richard C. DORF and Robert H. BISHOP, Modern Control Systems, Ninth Edition, Prentice Hall,2001 W.Bolton, Control Engineering: Longman, 1998 Katsushiko OCATA, Modern Control Engineering, Fifth Edition, Pearson, 2010 2
Control System Designs Basic Control System Concepts Transfer Functions of Physical Systems State Equations for Physical Systems Transient Response, Stability Forced Response Errors Design Using Sinusoidal Tools Design Using State Equations 3
Basic Control System Concepts 4
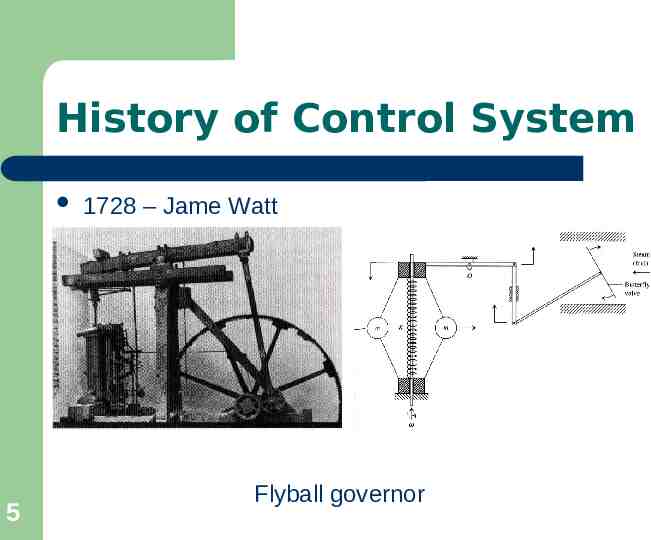
History of Control System 5 1728 – Jame Watt Flyball governor
History of Control System 1769 – Jame Watt 1868 – James Clark Mexwell 1877 – Routh’s Stability Criterion 1890 - Liapunov M.A. 1932 – H.Nyquist 1934 – H.W.Bode 1947 – Nichols chart 1948 – W.R.Evans 1954 – George Devol 6
History of Control System 1956 – 1969 Optimal control, Dynamic program, Optimization system, Fuzzy logic 1970 – 1979 State space model, Adaptive control 1980 – 1989 Robustness control, AI 1990 – 1999 Robot development and application 7
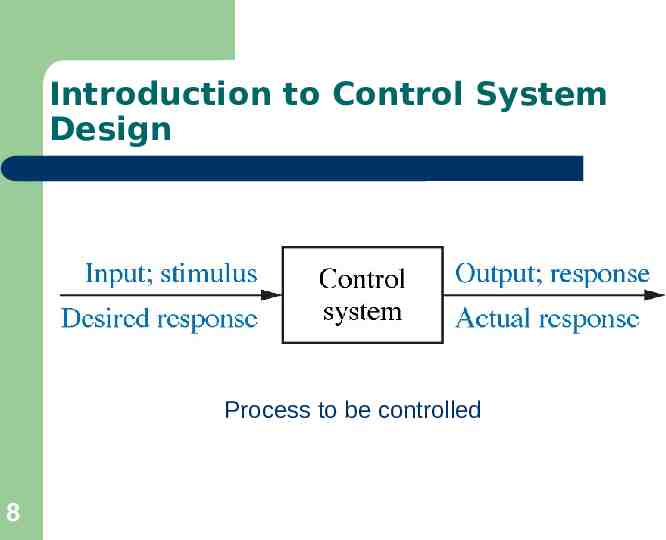
Introduction to Control System Design Process to be controlled 8
Introduction to Control System Design 9 Mathematical Model of Systems Relationship between input and output Test inputs
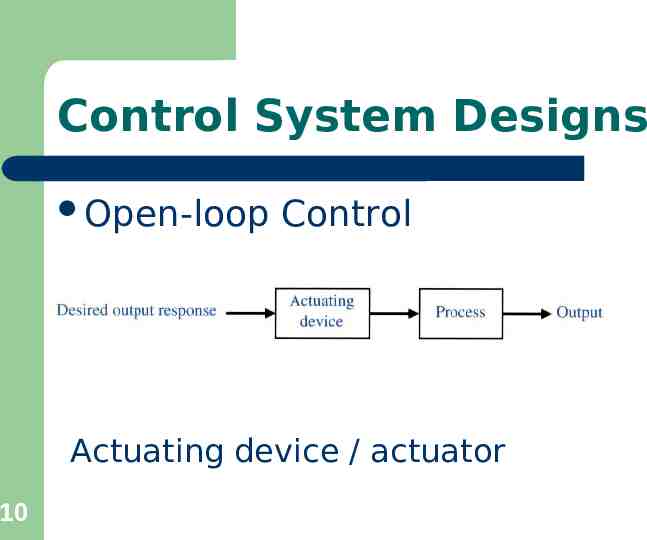
Control System Designs Open-loop Control Actuating device / actuator 10
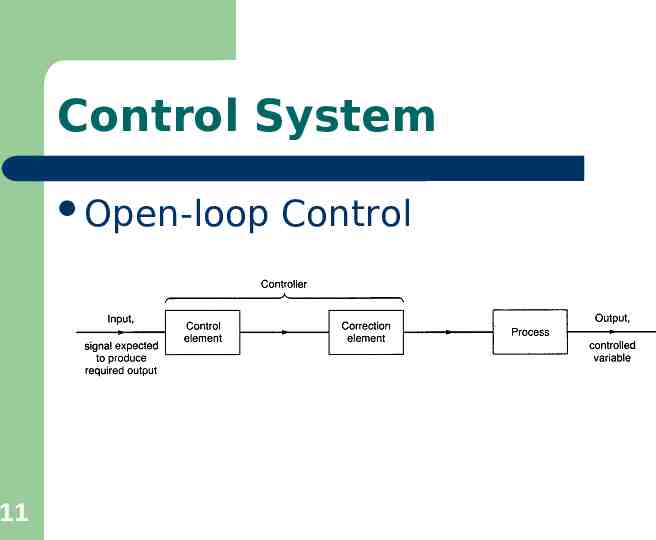
Control System Open-loop 11 Control
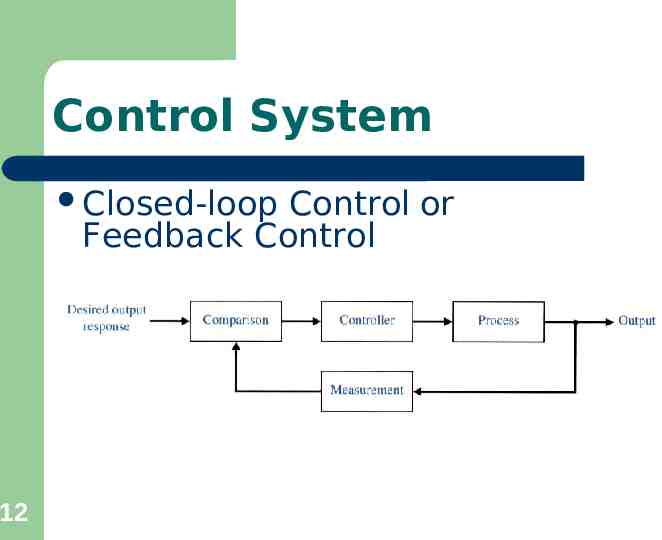
Control System Closed-loop Control or Feedback Control 12
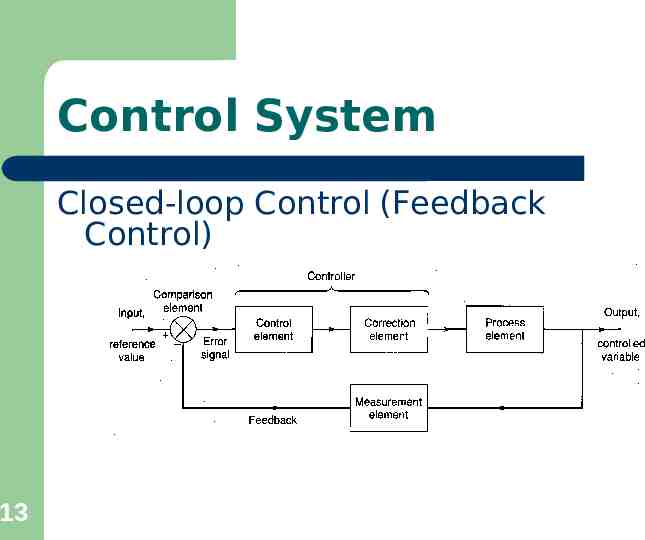
Control System Closed-loop Control (Feedback Control) 13
Closed-loop Control Comparison Element Control Element Correction Element Process Element Measure Element 14
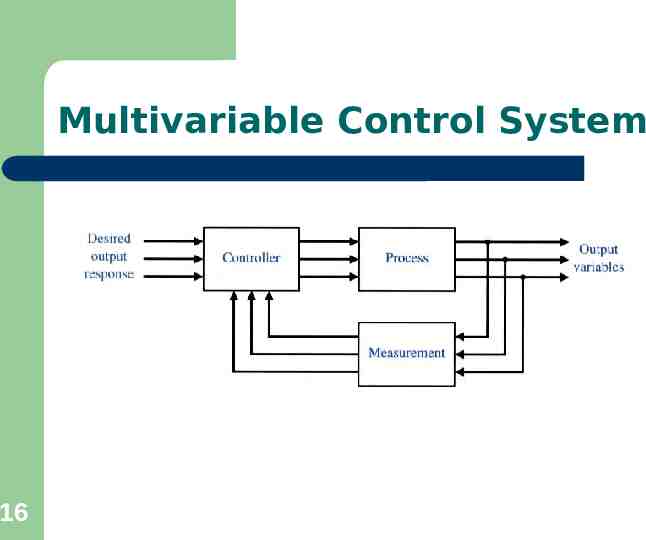
Control System SISO (Single Input Single Output) Multivariable Control System 15
Multivariable Control System 16
Control Engineering Analysis Stability o Dynamic Response and Performance Indices o Speed Accuracy Tolerance Design 17
Engineering Design 18 Specification Complexity of Design Trade-Off Design Gabs Risk Optimize the parameters
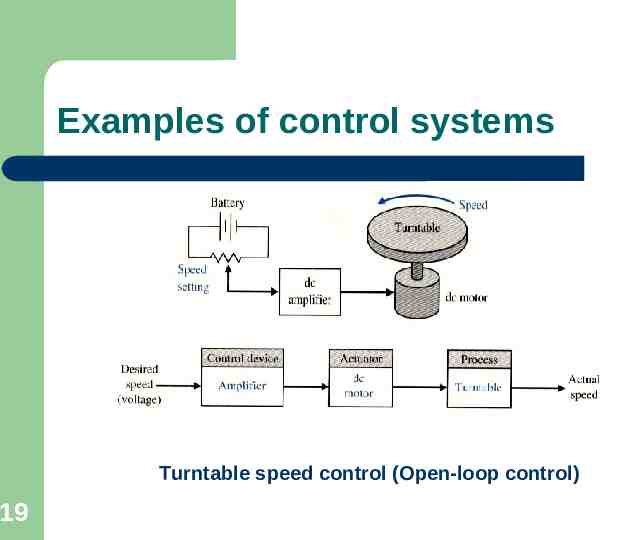
Examples of control systems Turntable speed control (Open-loop control) 19
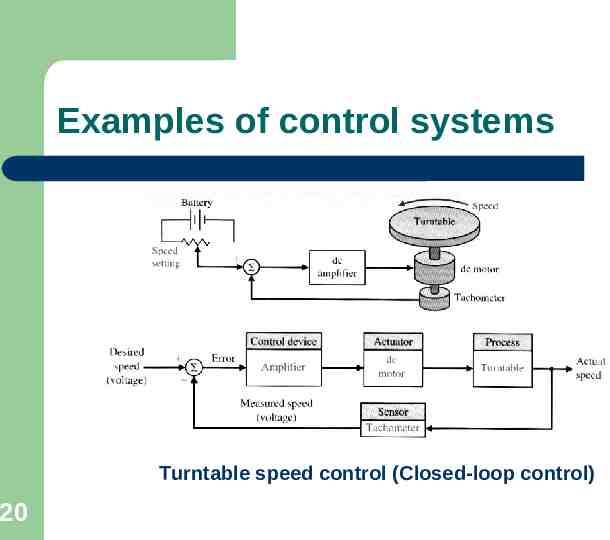
Examples of control systems Turntable speed control (Closed-loop control) 20
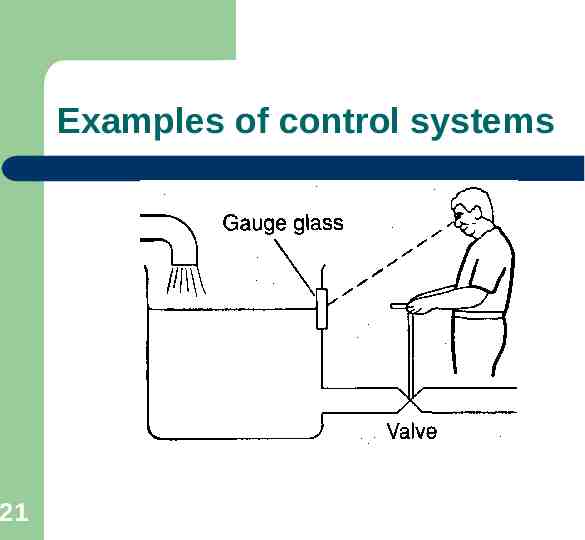
Examples of control systems 21
ระบบควบคุมการเปิดน้ำเข้าสูถ ่ ังแบบปิด Controlled variable Reference valve Compariso n element Error signal 22 Control ระดับน้ำในถังเก็บ ระดับน้ำที่ต้องการในถัง ซึ่งอาจจะกำหนด ด้วยขีดบนถังเก็บ ผู้ควบคุม ความแตกต่างระหว่างระดับน้ำในถัง กับ ระดับน้ำที่ต้องการ ผู้ควบคุม
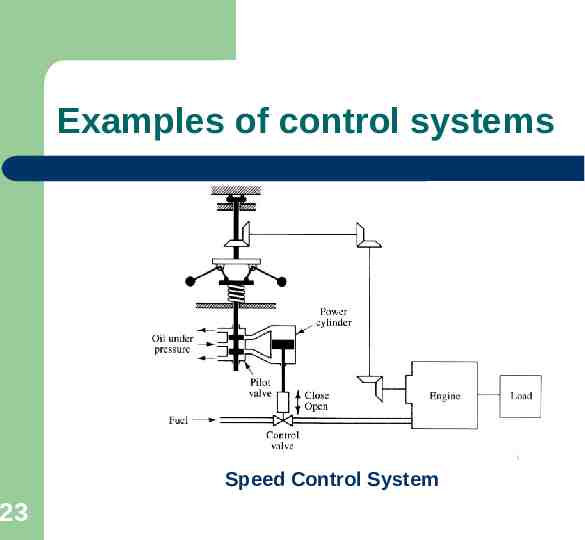
Examples of control systems Speed Control System 23
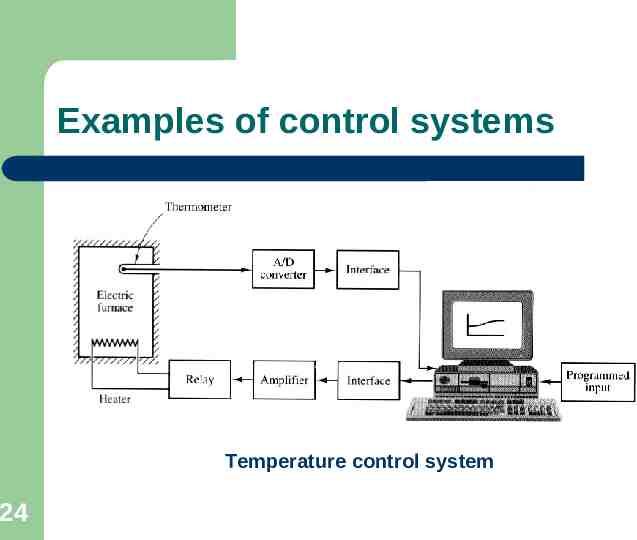
Examples of control systems Temperature control system 24
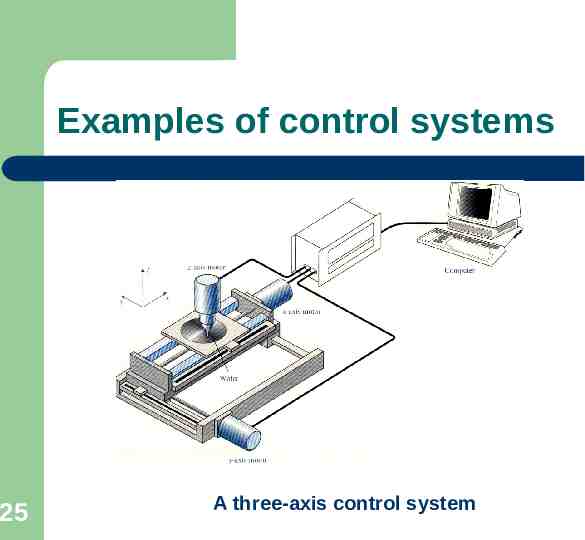
Examples of control systems 25 A three-axis control system
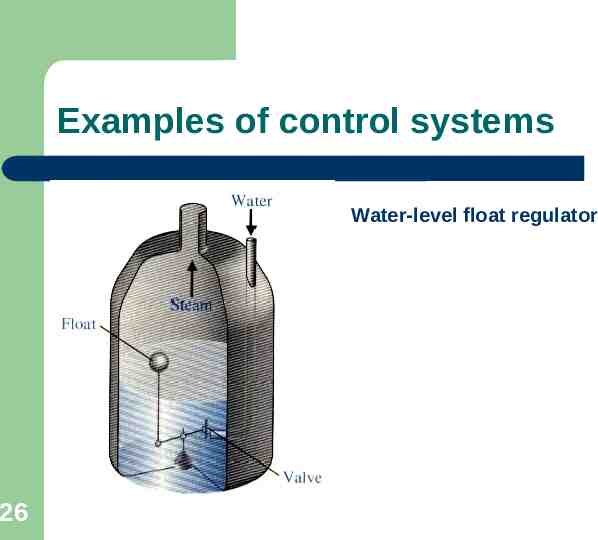
Examples of control systems Water-level float regulator 26
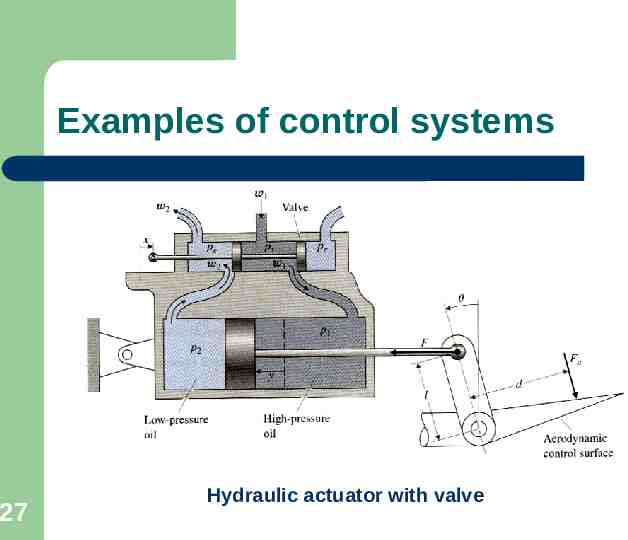
Examples of control systems 27 Hydraulic actuator with valve
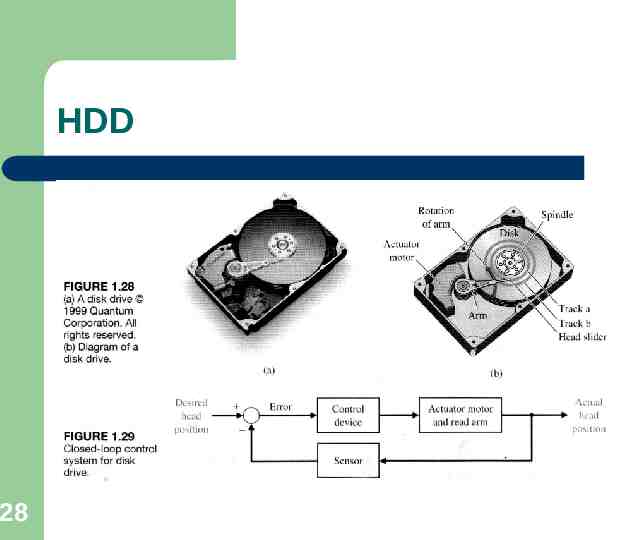
HDD 28
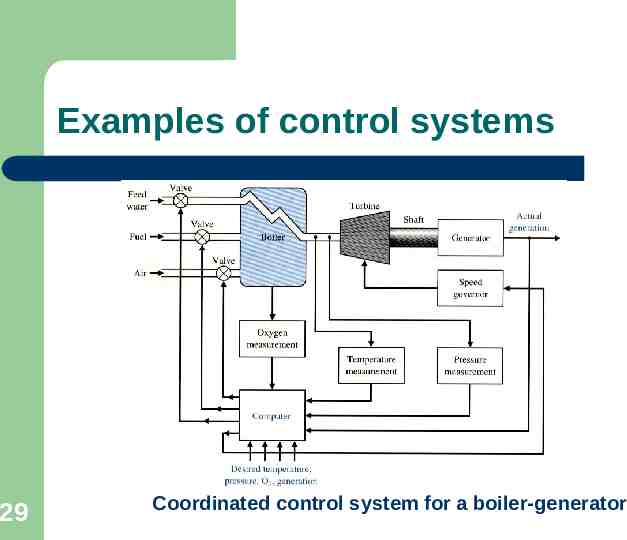
Examples of control systems 29 Coordinated control system for a boiler-generator
ADVANTAGES OF CONTROL SYSTEMS Power amplification Remote control Convenience of input form Compensation for disturbances 30
ADVANTAGES OF CONTROL SYSTEMS For example, a radar antenna, positioned by the low-power rotation of a knob at the input, requires a large amount of power for its output rotation. A control system can produce the needed power amplification, or power gain. Robots designed by control system principles can compensate for human disabilities. Control systems are also useful in remote or dangerous locations. A robot arm designed to work in contaminated environments. Control systems can also be used to provide convenience by changing the form of the input. For example, in a temperature control system the input is a position on a thermostat. The output is heat. Thus, a convenient position input yields a desired thermal output. 31
ADVANTAGES OF CONTROL SYSTEMS The system must be able to yield the correct output even with a disturbance. For example, consider an antenna system that points in a commanded direction. If wind forces the antenna from its commanded position, or if noise enters internally, the system must be able to detect the disturbance and correct the antenna’s position. 32
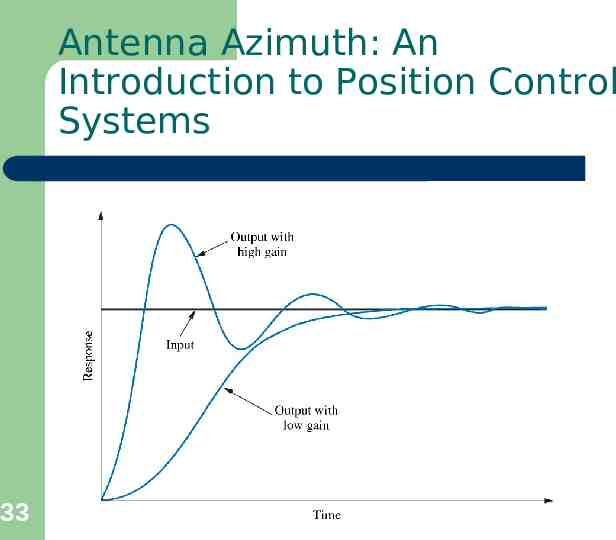
Antenna Azimuth: An Introduction to Position Control Systems 33
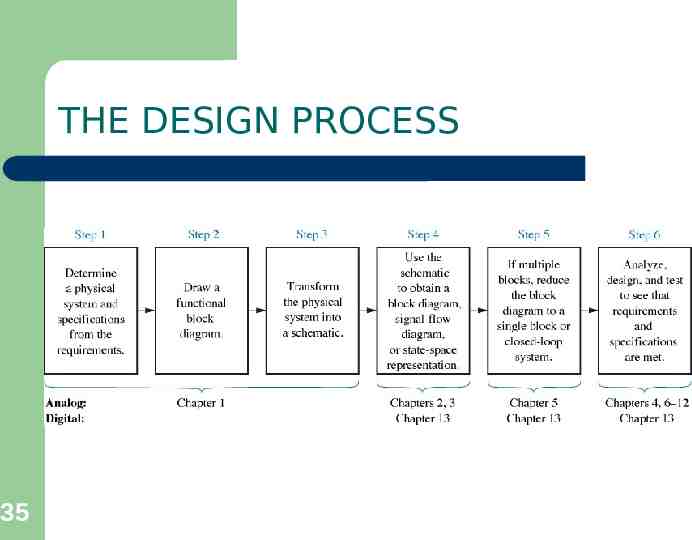
THE DESIGN PROCESS STEP 1: TRANSFORM REQUIREMENTS INTO A PHYSICAL SYSTEM STEP 2: 2 DRAW A FUNCTIONAL BLOCK DIAGRAM STEP 3: CREATE A SCHEMATIC STEP 4: 4 DEVELOP A MATHEMATICAL MODEL (BLOCK DIAGRAM) STEP 5: REDUCE THE BLOCK DIAGRAM STEP 6: 6 ANALYZE AND DESIGN 34
THE DESIGN PROCESS 35
THE CONTROL SYSTEMS ENGINEER Control systems engineering is an exciting field in which to apply your engineering talents, because it cuts across numerous disciplines and numerous functions within those disciplines. The control engineer can be found at the top level of large projects, engaged at the conceptual phase in determining or implementing overall system requirements. These requirements include total system performance specifications, subsystem functions, and the interconnection of these functions, including interface requirements, 36 hardware and software design, and test plans and